
【NuttX】任务调度的实现原理

调度(Schedule)是操作系统(OS)的核心功能之一,保证多任务多线程的应用能够高效的利用硬件资源。nuttx作为实时操作系统(RTOS),除了具备OS的功能,还需要保证实时性,而实时性则来源于中断和任务可抢占。
1 任务与线程
在RTOS中,一般称为任务(Task)与线程(thread),区别就是task可以包含多个thread,这里的包含是指thead间的资源可以共享,但是对于cpu来说,各个tread是相互独立的,是一个个调度单元,按照一定的策略来使用cpu。其中的数据结构是tcb_s(任务控制块),用来表示一个线程具有的属性。
2 线程的基本参数
在应用中建立线程时,需要指定线程的基本参数,包含:堆栈大小,优先级,调度策略。
堆栈的作用是 保存函数的局部变量,以及malloc的堆空间;优先级的作用是来表示线程的重要程度,以达到可抢占的状态;调度策略分为FIFO,时间片轮转,零星调度;
3 线程的全局队列与状态
nuttx建立并维护以下的全局队列:队列的作用是用来存放不同状态下的线程,以便于线程在不同的队列中进行移动,从而达到调度的目的。
volatile dq_queue_t g_readytorun;
volatile dq_queue_t g_pendingtasks;
volatile dq_queue_t g_waitingforsemaphore;
volatile dq_queue_t g_waitingforsignal;
volatile dq_queue_t g_waitingformqnotempty;
volatile dq_queue_t g_waitingformqnotfull;
volatile dq_queue_t g_inactivetasks;
状态:主要是三大类,运行,就绪,阻塞。而阻塞的情况较多一些,细分为等待信号量,信号...
enum tstate_e
{
TSTATE_TASK_INVALID = 0, /* INVALID - The TCB is uninitialized */
TSTATE_TASK_PENDING, /* READY_TO_RUN - Pending preemption unlock */
TSTATE_TASK_READYTORUN, /* READY-TO-RUN - But not running */
#ifdef CONFIG_SMP
TSTATE_TASK_ASSIGNED, /* READY-TO-RUN - Not running, but assigned to a CPU */
#endif
TSTATE_TASK_RUNNING, /* READY_TO_RUN - And running */
TSTATE_TASK_INACTIVE, /* BLOCKED - Initialized but not yet activated */
TSTATE_WAIT_SEM, /* BLOCKED - Waiting for a semaphore */
#ifndef CONFIG_DISABLE_SIGNALS
TSTATE_WAIT_SIG, /* BLOCKED - Waiting for a signal */
#endif
#ifndef CONFIG_DISABLE_MQUEUE
TSTATE_WAIT_MQNOTEMPTY, /* BLOCKED - Waiting for a MQ to become not empty. */
TSTATE_WAIT_MQNOTFULL, /* BLOCKED - Waiting for a MQ to become not full. */
#endif
#ifdef CONFIG_PAGING
TSTATE_WAIT_PAGEFILL, /* BLOCKED - Waiting for page fill */
#endif
NUM_TASK_STATES /* Must be last */
};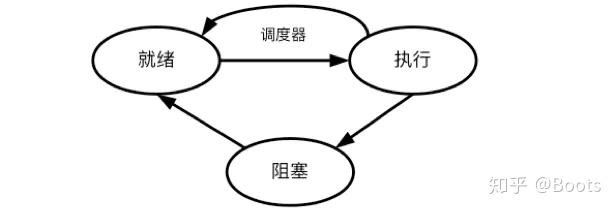
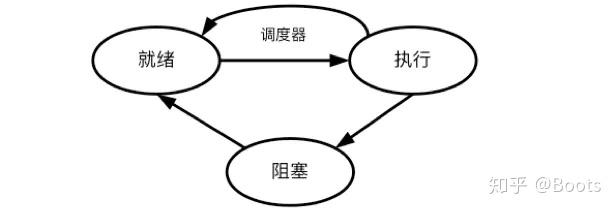
核心就是上面图中的状态转移,同时伴随着各个队列的增加/删除。
4 调度的实现
执行到阻塞,阻塞到就绪,就绪到执行,都会引起上下文切换(指cpu的寄存器内容切换),也就是调度。
以下以armv7-m为例,源码上探寻实现的原理:
在arch/arm/src/armv7-m目录下,
up_savestate(),up_restorestate()。这两个函数的作用就是用户保存正在执行的A线程的现场数据和恢复即将执行的B任务的数据。这就完成了上下文的切换。
/* Yes, then we have to do things differently.
* Just copy the CURRENT_REGS into the OLD rtcb.
*/
up_savestate(rtcb->xcp.regs);
/* Restore the exception context of the rtcb at the (new) head
* of the ready-to-run task list.
*/
rtcb = this_task();
/* Update scheduler parameters */
sched_resume_scheduler(rtcb);
/* Then switch contexts */
up_restorestate(rtcb->xcp.regs);而在 up_block_task(), up_unblock_task(), up_reprioritizertr(), up_releasepending() 这四个函数中均调用了以上两个函数。也就是说这四个函数都会引发上下文切换。
以up_block_task()为例,
void up_block_task(struct tcb_s *tcb, tstate_t task_state)
{
struct tcb_s *rtcb = this_task(); //获取当前需要阻塞的任务控制块
bool switch_needed;
/* Verify that the context switch can be performed */
DEBUGASSERT((tcb->task_state >= FIRST_READY_TO_RUN_STATE) &&
(tcb->task_state <= LAST_READY_TO_RUN_STATE));
/* Remove the tcb task from the ready-to-run list. If we
* are blocking the task at the head of the task list (the
* most likely case), then a context switch to the next
* ready-to-run task is needed. In this case, it should
* also be true that rtcb == tcb.
*/
switch_needed = sched_removereadytorun(tcb); //将需要阻塞的任务移除就绪队列
/* Add the task to the specified blocked task list */
sched_addblocked(tcb, (tstate_t)task_state); //根据任务的状态,将该任务移动到对应的队列中,
//比如说是等待信号量时被挂起了,则将该任务移动到g_waitingforsemaphore中
/* If there are any pending tasks, then add them to the ready-to-run
* task list now
*/
if (g_pendingtasks.head)
{
switch_needed |= sched_mergepending();
}
/* Now, perform the context switch if one is needed */
if (switch_needed)
{
/* Update scheduler parameters */
sched_suspend_scheduler(rtcb);
/* Are we in an interrupt handler? */
if (CURRENT_REGS) //是否在中断处理中?
{
/* Yes, then we have to do things differently.
* Just copy the CURRENT_REGS into the OLD rtcb.
*/
up_savestate(rtcb->xcp.regs); //将寄存器的值保存到老线程的tcb中
/* Restore the exception context of the rtcb at the (new) head
* of the ready-to-run task list.
*/
rtcb = this_task(); //这里获取到的线程则是即将执行的线程,因为g_readytorun队列的头被删除了,
//这里就是下一个队列中的线程
/* Reset scheduler parameters */
sched_resume_scheduler(rtcb);
/* Then switch contexts */
up_restorestate(rtcb->xcp.regs); //重点:将新的线程tcb中保存的寄存器数据恢复至cpu寄存器中,即完成了调度
}
/* No, then we will need to perform the user context switch */
else
{
struct tcb_s *nexttcb = this_task();
/* Reset scheduler parameters */
sched_resume_scheduler(nexttcb);
/* Switch context to the context of the task at the head of the
* ready to run list.
*/
//若不是中断处理,则直接进行上下文切换,该函数的逻辑是:
//up_switchcontext() -> svc 0 -> 异常处理(SVCall or HardFault) -> bl up_doirq -> hardfault_handler
// up_hardfault -> up_svcall(执行上下文切换)
up_switchcontext(rtcb->xcp.regs, nexttcb->xcp.regs);
/* up_switchcontext forces a context switch to the task at the
* head of the ready-to-run list. It does not 'return' in the
* normal sense. When it does return, it is because the blocked
* task is again ready to run and has execution priority.
*/
}
}
}所以函数up_block_task()的作用就是将正在执行的线程挂起(放入阻塞队列),并执行下一个就绪队列中的优先级最高的那位线程。
调用up_block_task()的接口有:
mq_receive()mq_timedsend()mq_send()mq_timedreceive()sem_wait()//等待获取信号量sigsuspend()sigtimedwait()
所以,以上的函数均会引发调度。也不难理解,当线程获取的信号量为0是,接收的消息队列为空时,应该将其挂起(阻塞),并执行下一个就绪的线程。
与之配对的函数为:up_unblock_task(),作用是将阻塞的线程移动到就绪的队列中,并引发调度。
调用up_unblock_task()的接口有:
mq_receive()mq_timedsend()mq_send()mq_timedreceive()sem_post()//释放信号量sig_tcbdispatch()sem_waitirq()mq_waitirq()sig_timeout()task_activate()
5 后记
对于cpu(arm-m7内核)来说,只有顺序执行,和响应中断处理,它并不知道线程,任务。
只需要告诉cpu当前堆栈指针在哪?(R13=SP)
下一步要去哪?(R15=PC)
发生异常了怎么处理?(ISR)
那么将不同的任务的运行环境(内核寄存器的值)作一个保存与恢复,也称之为上下文切换,即为调度。
在实际的嵌入式开发中:
关于任务堆栈,一般尽量设置大一些,并减少递归调用,防止堆栈溢出,一旦溢出,很可能修改到其他任务的私有数据,从而引起系统部崩溃。因为在没有MPU,MMU的支持下,各个任务的内存地址空间是扁平化的,是线性的实际物理地址,很容易相互影响。
关于优先级,一般将重要的任务优先级提高,数据的源头(传感器)优化级提高,并且有被动挂起的机会,或者主动释放cpu的机会,这样低优先级的任务才可能有运行。在优先级相同的情况下,可以选择FIFO,或者时间片轮转。
