
游戏中的全局光照(四) Lightmap、LightProbe和Irradiance Volume

接下来我们来讨论静态GI的漫反射部分,首先需要明确的是,这里的漫反射GI,指的是最后一步是漫反射,而不关心前面的光传播路径是漫反射还是镜面反射。
预计算 Irradiance
在前面我们讲环境光照漫反射时,我们提到,要计算物体的环境光照漫反射,需要把 radiance map值预积分为 irradiance map,然后使用球谐系数来保存。
如果仅仅使用一个天空光照的漫反射系数,那么很多环境光照的变化,就无法体现。设想在一个包含了室内室外的场景,如果在室内依然使用室外的环境光照,那么得到的结果就是错误的。
对于全局光照的漫反射部分,我们会使用 Irradiance Probe,来保存某个区域附近的 irradiance 信息。在游戏引擎中,这个步骤通常是通过烘焙器来实现的,烘焙器会与计算某个点附近的 irradiance 信息,并使用某种格式来保存。你可以把这个过程视为烘焙器在 Irradiance Probe的位置,朝着六个方向各拍摄了一张照片,然后合成一个环境光照图,再生成 irradiance 信息。
Lightmap的存储和使用
通常,我们会使用这样两种方式来放置Irradiance Probe。
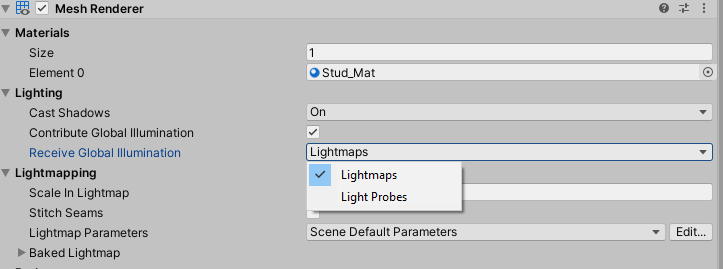
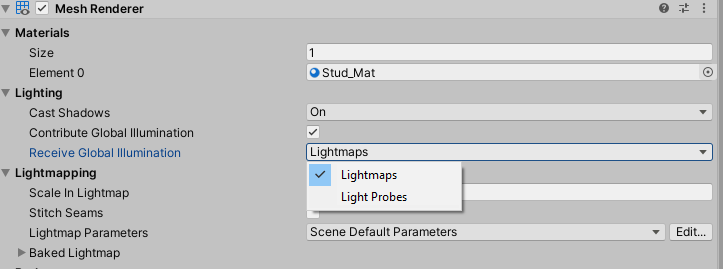
第一个方式针对于静态物体,我们常常使用Lightmap来保存。在使用lightmap时,我们的 irradiance probe是均匀地摆放在物体的表面,然后将烘焙的结果保存在一些名为 lightmap 的贴图中,这样我们在渲染物体是,直接通过uv2在lightmap中采样烘焙好的光照信息。相对于Light Probe,lightmap 是不需要保存背面的光照信息的,如果继续使用球谐系数来保存,就会造成存储空间的浪费。
第二种是 LightProbe/光照探针,适用于静态光照环境下的可自由移动的动态物体,此时无法使用 lightmap 来烘焙光照了,我们使用light probe的方式来预计算漫反射烘焙光照。
下面分别来看下:
Lightmap存储光照信息的一些形式
在使用Lightmap时,我们会通过如下的几种方式来保存 Irradiance 信息。
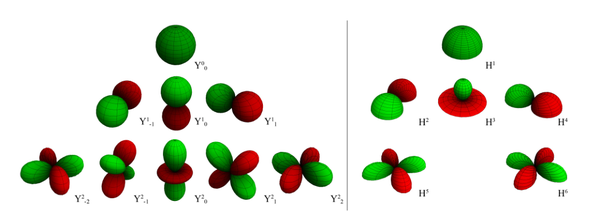
H-Basis
H-Basis只考虑半球面上的光照,因此相对SH需要更少的存储空间。H-Basis每个通道需要6个系数, 需要和几何体的切空间配合使用[1][2]。

球形高斯
在教团:1886中有较多应用[3]。
Ambient/Highlight/Direction
顾名思义, AHD用三个值 环境光ambient,高光hightlight,高光方向 direction来表示Diffuse GI的效果。AHD使用这样三个数值来近似表示Diffuse GI,每个点需要8个float值来表示(direction只需要两个float)。 因为AHD的真个过程不是线性的,因此AHD的难点在于如何寻找合适的分配方式,将GI分成固定的ambient部分和 可变化的hightlight部分。使命召唤中的具体实践可以参考[4]。


Radiosity Normal Mapping/Half-Life 2 Basis
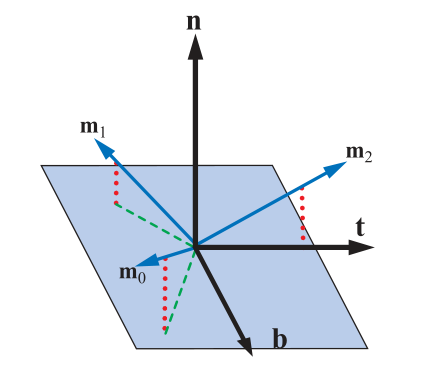
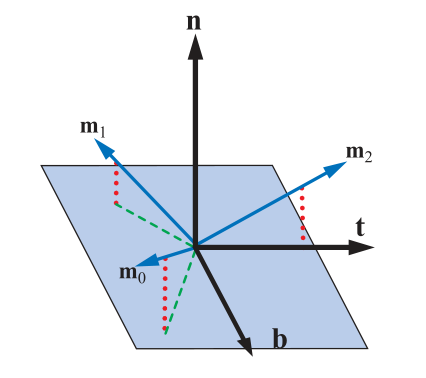
RNM方法在切平面上指定三个正交基的方向
m_0 = ( \frac{-1}{\sqrt{6}}, \frac{-1}{\sqrt{2}}, \frac{1}{\sqrt{3}}),\\ m_1 = ( \frac{-1}{\sqrt{6}}, \frac{-1}{\sqrt{2}}, \frac{1}{\sqrt{3}}),\\ m_2 = ( \frac{\sqrt{2}}{\sqrt{3}}, 0, \frac{1}{\sqrt{3}})\\ 计算GI在三个正交基上的投影, 并进行重构。
UE4
UE4中的Diffuse GI烘焙保存最大光照度和一个二阶球谐系数。 这样每个点需要的系数个数为:3个RGB分量+Log光强度值(压缩用)+4个二阶球谐系数 = 8,正好可以用两张贴图保存. 个人猜想这样做的原因是:
- 这里仅保存Diffuse, 随方向强度变化一般很平缓, 二阶球谐的精度够用。
- 每个点使用8个float值, 尽量减少存储空间占用。
- 去掉二阶球谐系数, 也可以直接用来作为不带方向的预计算光照。这样可以使烘焙出来的lightmap 兼容两种方案(不知道为啥, ue4没有提供不带方向lightmap的全局设置,这也是一个手游的优化点)。
Lightmap的保存和使用
根据使用的GI方案不同,数据的处理方式也不同。譬如对于AHD,Direction可以直接存储两个方向值,取方向时做一次标准化即可。而对于Ambient和Hightlight 颜色值, 通常需要处理成非线性的来存储.
因为 lightmap 相对于 albedo贴图是无法复用的,因此 lightmap的相对密度要低很多。 通常 lightmap中的一个texel对应20cm*20cm的大小,已经是精度很高的烘焙了。 对于不同的场景, 往往需要不同的lightmap设置, 比如在室内需要高精度,在室外使用低精度。
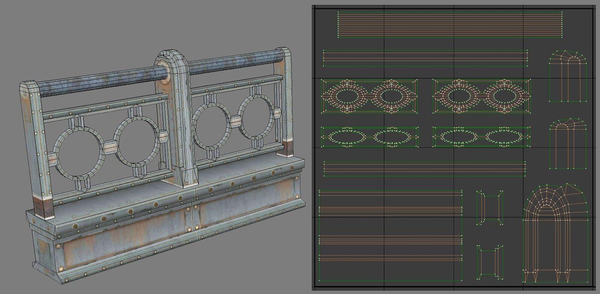
对于每个模型的每个三角形,都是需要在lightmap上独占一部分区域的。通常在开始烘焙前,需要将模型划分为数个chunk,对应的uv就是常说的lightmap uv/uv2。这一步可以是手动设置的uv,也可以是自动生成的,生成lightmap uv的过程也叫做 uv unwraping,uv unwraping有很多需要注意的细节。
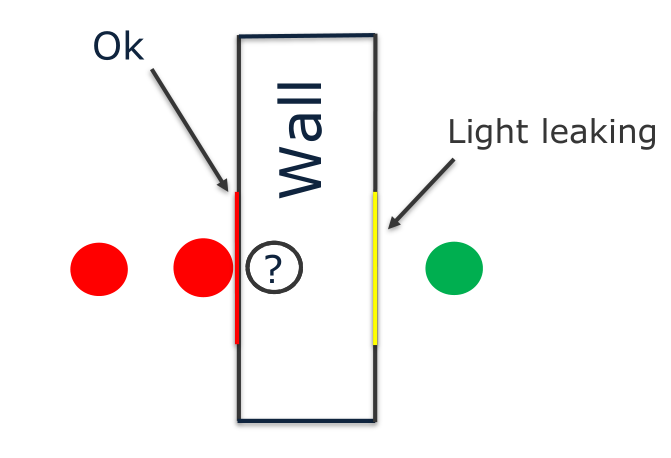
ligtmap uv 需要保证是在 0~1之间, 且chunk之间应保留至少两个像素的间隔,这样可以防止 blinear 采样时, 采样像素被其他 chunk 部分的像素影响,出现漏光/bleeding。

另外一种常见的漏光是光照变化快的地方,烘焙的lightmap精度不够导致的漏光。常见于室内外的地面,墙角处的漏光。解决方法是增大相应物体的lightmap精度,或者将墙面加厚。
如果两个邻接面间的角度很大, 导致两个面的光照信息有很大差异, 但是却划分在同一个chunk中, 就会产生接缝/seams, 这样两个面的烘焙光照会互相影响. 这是一个需要避免的情况.
每个物体的烘焙贴图形成一个chart,将所有场景中物体烘焙的chart进行汇总,合并到一个或多个贴图上, 就是lightmap。
有些情况下,我们也可以选择将烘焙的光照数据直接保存到模型的每顶点数据。
使用Light Probe实现动态光照
上面我们说的lightmap,是针对静态光照和静态物体的常用烘焙光照方式。在静态光照下,动态物体可以在场景中自由移动的情况下,就无法使用 lightmap 来烘焙光照了,此时我们使用光照探针(light probe)的方式来预计算漫反射烘焙光照。此外对于比较小型的静态物体,我们也会使用 light probe 来计算,这样一来是减少 lightmap 占用的内存,二来可以减少场景烘焙的时间,光照质量往往差别不会特别大。
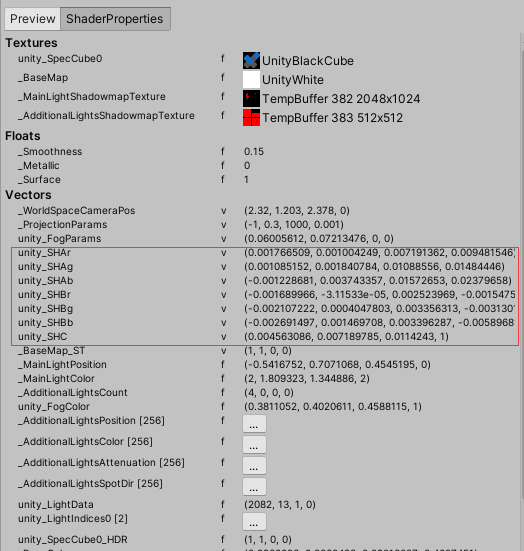
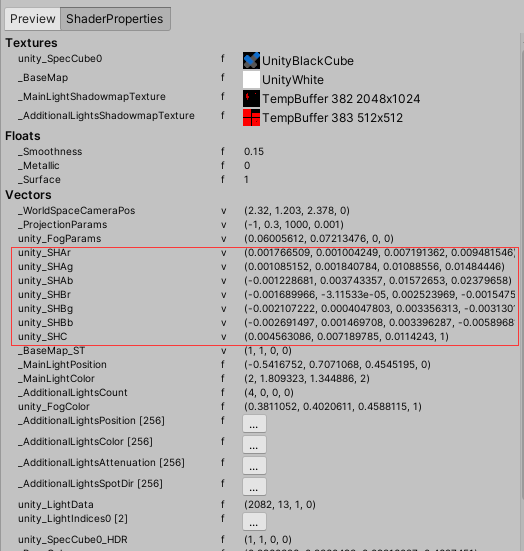
光照探针是放置在场景中的许多位置点,烘焙光照的方式和lightmap中的烘焙方式基本相同。因为 light probe 相对于 lightmap密度要小的多,因此通常会使用完整的三阶球谐SH,27个系数来保存light probe 的光照信息。
LightProbe在场景中的摆放,可以是自动摆放,也可以是手动摆放。都要遵循越密集的物体附近,放置越多 light probe的原则。场景中的 Lightprobe,会进行完美三角化剖分[5]。
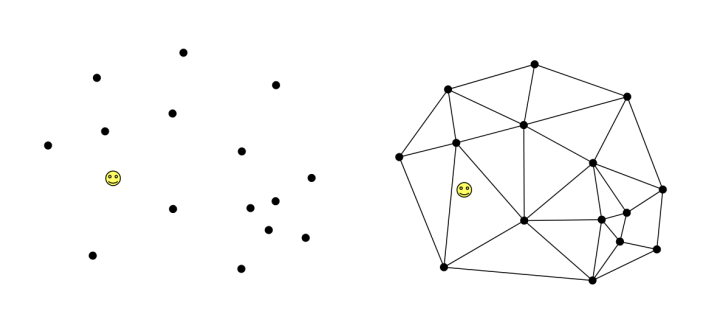

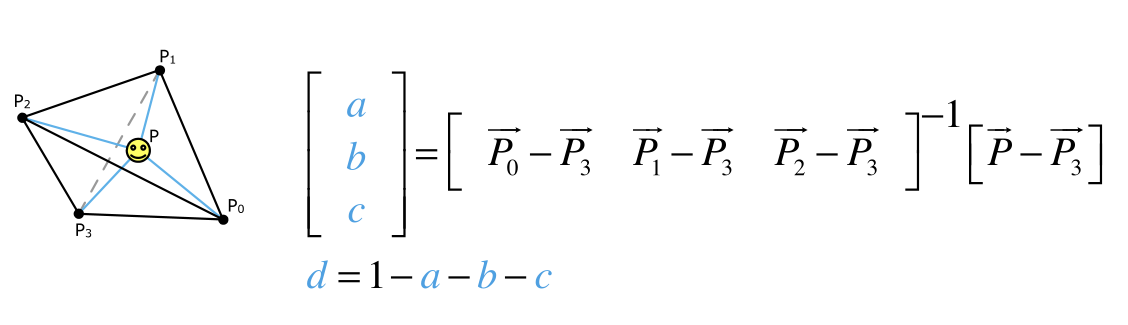
这样每个空间中的位置点,都可以找到附近最近的四个构成四面体的点,并求出当前位置在四面体中的重心坐标,然后使用重心坐标,使用四个顶点的球谐系数进行插值计算。


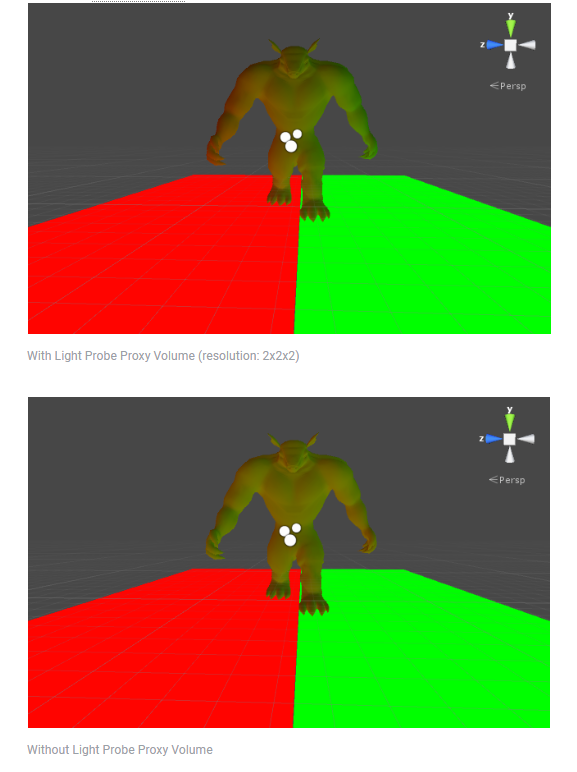
在CPU中进行插值,每个物体上的所有点,只能使用一个球谐系数。如果要渲染的物体特别大,跨越了两个光照明显不同的地方,就会造成明显的渲染错误。
一种解决方式是,在物体周围建立一个Volume,在CPU中按照NxNxN的采样位置点对球谐系数进行线性插值采样取值,然后将所有参数传入到GPU中,在每像素着色时,再根据世界空间坐标,对NxNxN的球谐Volume进行线性插值,得到逐像素的球谐系数。
这样的额外开销会比较大,不过考虑到需要设置成这种方式来插值的物体其实不多,额外的开销也是可以接受的。

球谐函数的Deringing
使用球谐函数计算 light probe 光照,有时会遇到 ring /振铃效应的问题,当接近一个punctual light进行光照烘焙时,就有可能出现这个问题。
关于这个问题,已经在本系列第二篇文章中详细描述过解决的方法[6],这里就不再深入分析了。
Light Probe 的漏光处理
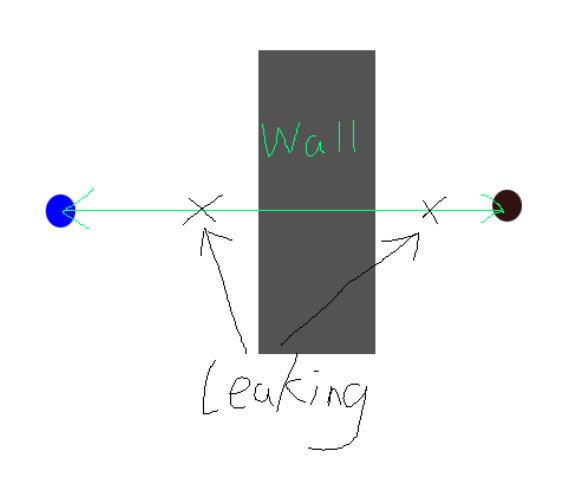
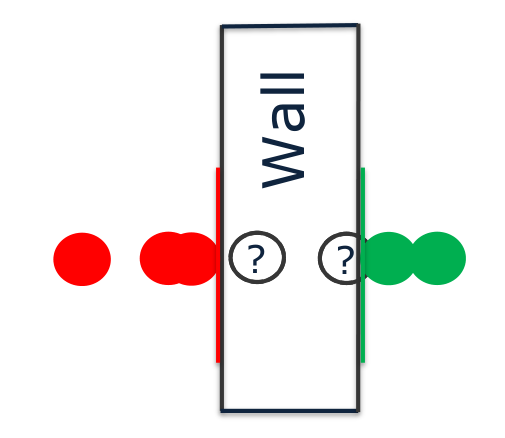
使用 light probe时,常常会遇到漏光的问题。漏光常常发生在被墙壁阻挡的室内外之间,两个相邻的 light probe,分别烘焙了室内和室外的光照,进行光照插值时,会在两个 light probe之间进行,但是其实两个 light probe 之间是不应该有任何联系的,这样就形成了漏光。漏光可能是在室内错误地采样到室外的光照,也可能是在室外错误地采样到室内的光照。

解决漏光问题,需要根据实际使用的游戏引擎,light probe 管理方式,游戏项目需求,而采取不同的方案,这里试列举一些游戏内的方案如下:
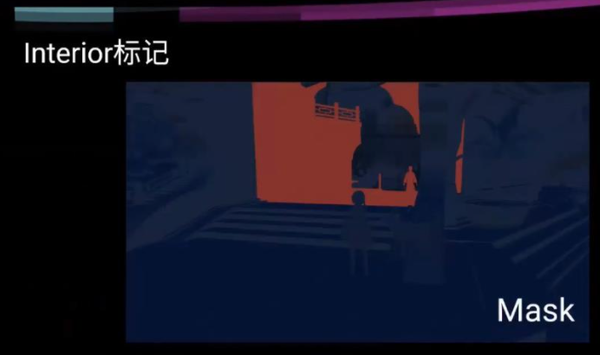
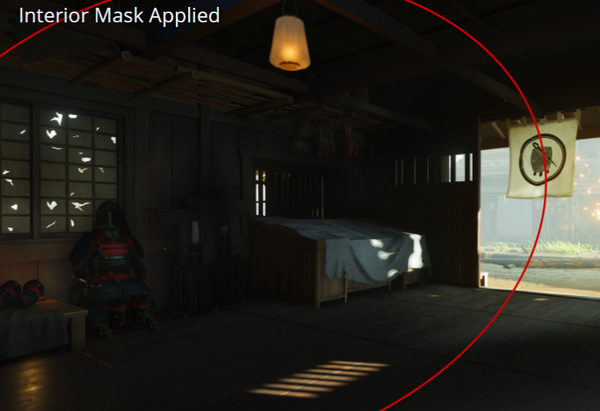
原神:将室内外的 light probe 分开烘焙,使用一个 volume 标记室内区域,室内外区域分别使用对应的 light probe 数据,同时在门口区域,进行过渡处理。



对马岛之魂:为每个 light probe 设置室内外标记,记录权重值 \omega 。在四面体网格中计算重心坐标时,会传入一个表示室内外权重的权重值,根据权重值和四面体上四个点的室内外权重值,重新计算出新的重心坐标。



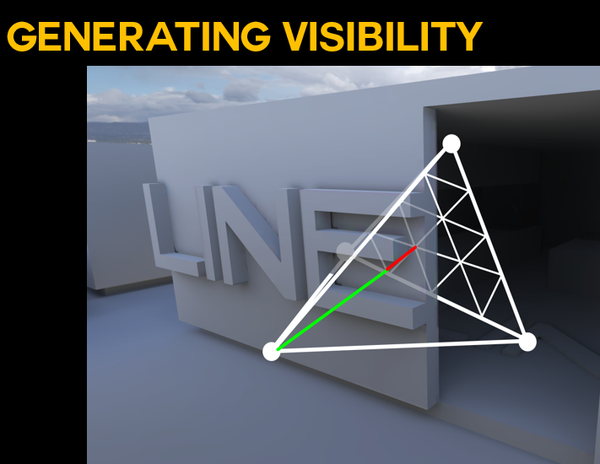
使命召唤无尽战争:对每个四面体,记录每个顶点相对面上的遮挡信息,计算时考虑是否被遮挡。

Irradiance Volume/Volumetric Lightmap
静态中大型物体使用 Lightmap,动态或小型静态物体使用 LightProbe,是近些年来游戏中常用的主流做法,不过这种做法,目前存在以下的问题:
- lightmap需要展二套uv,二套uv需要一些手动处理,烘焙时间较长,美术做了一点微小的改变,就需要完全重新烘焙。
- Light probe无法适用于大型物体,无法体现空间中烘焙光照的变化。
- 体积雾无法使用烘焙的数据。
Irradiance Volume的思路[7],是使用3D 纹理,来代替传统的CPU插值属性。将空间中的光照属性,保存到3D纹理中,这样在采样光照属性时,就可以直接采用三线性的方式来采样3D纹理,获得自然的过渡效果。
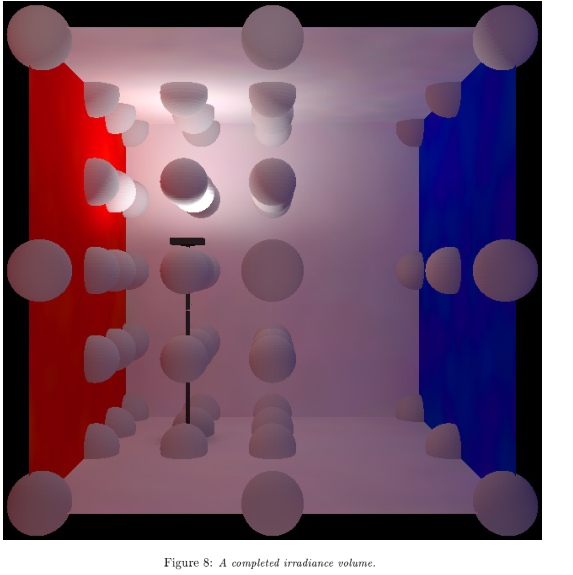
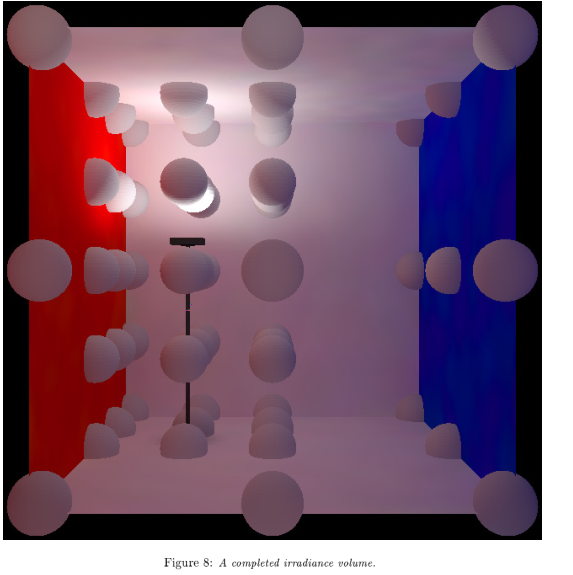
相对于Lightmap 和 Light Probe的组合方式,Irradiance Volume有烘焙速度快,不用烘焙并存储两套数据,可同时用于静态动态物体,可以在体积雾中应用烘焙光照等诸多优点。相对的缺点就是需要逐像素的额外采样,这个额外的开销在现代的机器上完全是可以承受的。
可以说,在使用静态光照的游戏中,Irradiance Volume正在快速取代传统的 Lightmap 和 Light Probe的组合,成为目前的主流静态光照实现,也有非常多的实践供参考[8][9][10][11]。
IrrandiceVolume的原理和LightProbe是非常接近的,但是又有些不同。在游戏实践中使用 Irradiance Volume,需要处理的问题主要是这样几个,我们这里来简单介绍如下。
光照信息的表示方式
在Light Probe中,我们常常使用三阶球谐系数来表示光照。在Irridiance Volume中,因为内存空间有限,使用27个系数的三阶球谐就不行了,我们一般会使用二阶球谐或者压缩的二阶球谐来存储光照信息。
压缩的二阶球谐是这样来简化存储的,原始的二阶球谐系数共需要9个系数:
设RGB通道的二阶球谐系数分别为 LR_n^m, LG_n^m, LB_n^m ,则压缩第二阶球谐系数为:
LX_1^{-1} = \frac{LR_1^{-1} / LR_0 + LG_1^{-1} / LG_0 + LB_1^{-1} / LB_0}{3} \\ LX_1^{0} = \frac{LR_1^{0} / LR_0 + LG_1^{0} / LG_0 + LB_1^{0} / LB_0}{3}\\ LX_1^{1} = \frac{LR_1^{1} / LR_0 + LG_1^{1} / LG_0 + LB_1^{1} / LB_0}{3}\\ 我们存储六个球谐系数 LR_0,LG_0, LB_0, LX_1^{-1},LX_1^{0},LX_1^{1} ,并这样来还原光照:
light = (LR_0, LG_0,LB_0) * (1 + dot(normal, (LX_1^1, LX_1^0, LX_1^{-1}))\\ 这种压缩方式之所以可行,是因为球谐函数的第一阶,表示整个球面上的均值,且球谐函数的第二阶,和第一阶光照信息大致成一定比例。
空间中的数据结构
考虑到场景中的物体信息变化,我们需要在某些地方增加Irradiance Volume 的密度,来提供更多的光照信息。这样,我们一般会使用 Sparse Irradiance Octree 来组织Irradiance Volume 信息。
Sparse Irradiance Octree 是稀疏的八叉树,首先我们将场景划分成等大小的格子,并在顶点处放置探针,作为第一级别的节点和Probe信息。如果一个格子内检测到有物体,或者和标记的重要区域有重叠,则对其进行再次细分。重复这个过程,直到达到最大细分级别为止。通常来说,将最大细分次数设置成3就可以了。
然后就是将各个探针的数据,设法映射到3D纹理中,实现正确的插值采样。我们可以这样来实现:
首先将第一级别的Probe信息,保存到一个3D纹理中,这个级别的Probe,都是均匀排布的,可以直接按照位置等比例地放置到Atlas纹理中。
然后考虑细分的节点,对于每个被细分的节点,我们叫做一个Brick,如果该节点的子节点被再次细分,则子节点也形成一个Brick。这样,我们搜集每个Brick'的光照信息,并整排列放置到Atlas贴图中,
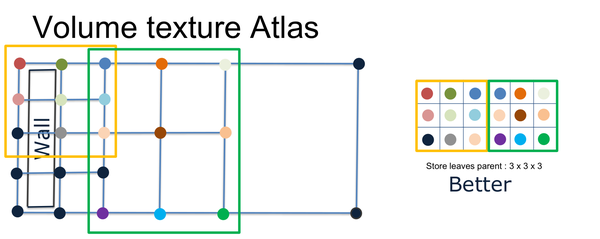
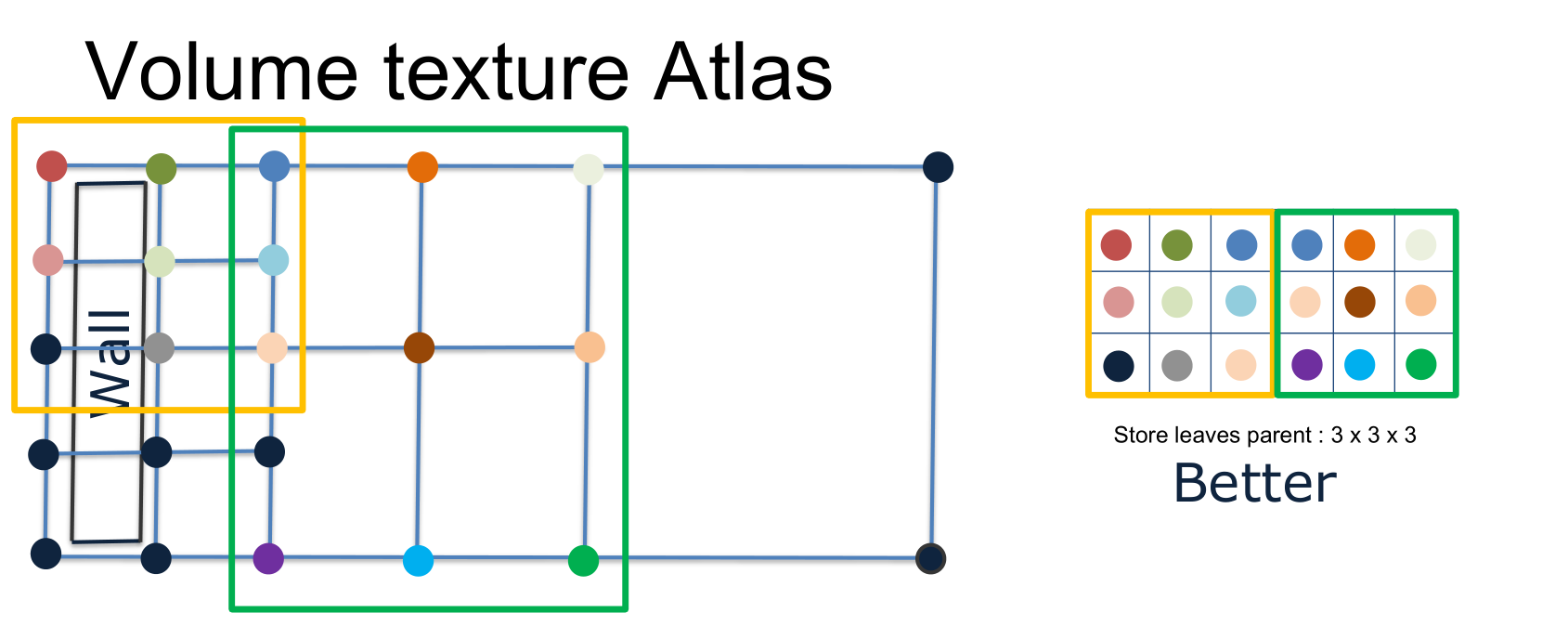
为了能从世界坐标快速找到相应的Brick块位置,我们还需要一张查找表信息纹理,保存每个Brick的位置信息。这个查找表信息纹理,是和世界坐标成线性映射的。如果当前的坐标在某个Brick中,就将其指向相应Brick的位置,如果不在某个Brick中,就指向均匀排布的最高级别的Probe信息块中。
这样我们成功地将Sparse Irradiance Octree 中的probe信息,保存到了3D纹理中。
当然,你也可以选择在GPU中使用指针来构建一个真实的Octree,不过这种实现会复杂很多[12]。
解决漏光问题的几种方式
简洁光照的采样点,如果放置在物体内部,就会导致计算间接光照时,某些区域变成黑色,有很多种方法来缓解漏光问题,这里简单列举常见的两种方式如下。注意,完全解决漏光是不太现实的。
在 SIGGRAPH 2022 上,Unity 分享了一个 DEMO[11],总结了目前常见几种漏光解决方式,非常值得一看。
虚拟偏移:
一种简单有效的解决方式,是检测每个Probe的位置。如果一个Probe处于物体内部,且距离边界很近,就将其向边界方向进行偏移,直到达到边界外为止。注意Probe的位置偏移只会改变这个Probe搜集静态光照的位置,而不会影响物体寻找静态光照的方式,因此这个偏移叫做虚拟偏移。
这种方式的难点在于如何判定采样点在物体内部,以及寻找最贴近的点。通常来说,我们会使用 SDF 构建距离场,来实现这个过程。对于较大场景,使用 VDB[13] 也是一个可行的方案。


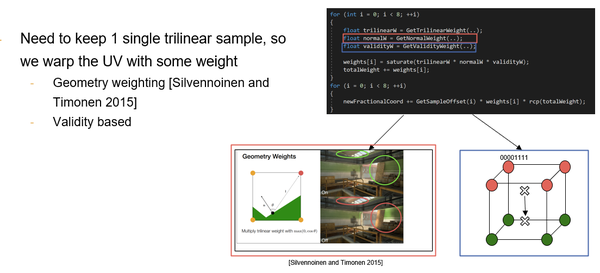
调整权重:
根据采用光照的方向,计算周围八个点的权重。在加上被标记成无效点的权重,综合成新的权重,然后根据新权重将采样点进行偏移,这样可以保证一次三线性采样就能得到结果。

参考
- ^https://www.researchgate.net/publication/220792093_Efficient_irradiance_normal_mapping
- ^https://web.archive.org/web/20160313132301/http://www.geomerics.com/wp-content/uploads/2015/08/CEDEC_Geomerics_ReconstructingDiffuseLighting1.pdf
- ^https://therealmjp.github.io/posts/sg-series-part-1-a-brief-and-incomplete-history-of-baked-lighting-representations/
- ^https://www.activision.com/cdn/research/Precomputed_Lighting_in_CoD_IW.pptx
- ^https://zhuanlan.zhihu.com/p/34158974
- ^https://zhuanlan.zhihu.com/p/162793239
- ^https://www.academia.edu/9445480/The_Irradiance_Volume
- ^https://www.semanticscholar.org/paper/%E2%80%9DHustle-by-Day%2C-Risk-it-all-at-Night%E2%80%9D%3A-The-Lighting-Garcia-Lindqvist/12d844f5d90f38e64878ee9e978e079edf19022d
- ^https://www.gdcvault.com/play/1025339/The-Lighting-Technology-of-Detroit
- ^https://research.activision.com/publications/2021/09/large-scale-global-illumination-in-call-of-duty
- ^abhttp://advances.realtimerendering.com/s2022/SIGGRAPH2022-Advances-Enemies-Ciardi%20et%20al.pptx
- ^K. Garcia, A. Lindqvist, A. Brink, ”Hustle by Day, Risk it all at Night”: The Lighting of Need for Speed Heat in Frostbite, SIGGRAPH 2020 talks
- ^https://www.openvdb.org/
