增强学习入门2——形式化

本文收录在无痛的机器学习第二季目录。
前言
这个系列是我和InfoQ合作的《无痛的增强学习入门》系列,现转载到知乎专栏中。首发地址在:无痛的增强学习入门: 增强学习形式化 ,欢迎围观。
上一节我们以蛇棋为例,主要介绍了增强学习的核心流程,那就是Agent与Environment的交互。这一节我们需要进一步形式化这个过程,站在数学的角度分析这个问题的解决方案。对于增强学习来说,大家一般喜欢以马尔科夫决策过程这样一个模型作为形式化的手段。
2.1 MDP——策略与环境模型
我们再回到蛇棋中来。有哪些因素决定蛇棋最终获得分数的多少?其实就两个:一是选择投掷什么样的手法,二是投掷出的数目。第一个问题是玩家可以决定的,第二个是无法确定的,这里充满了随机性。
如果再进一步看,有哪些结果/状态决定了最终的得分呢?那就是每一步走到位置和每一步选择的投掷手法了。比方说上一节展示的游戏过程。我们用 S_t 表示t时刻游戏的状态,也就是行走到的位置,用 a_t 表示t时刻选择的手法,那么游戏过程就可以用一条状态-行动链条来表示了:

这个链条有两种状态转换的模型,一种是从状态到行动的转换,另一种是从行动到状态的转换,这两种转换分别对应了前面提到的两个决定因素。对于第一种转换来说,它通常被认为是由玩家的策略决定的,对于第二种转换来说,它通常是由环境决定的。下面就来看看详细形式化这两种转换。
所谓的策略,就是根据当前的状态选择“自认为”最好的行动,如果我们认为玩家会对每一个行动进行一次打分,那么玩家最终会选择打分最高的那种行动;如果我们认为玩家的每一个行动都有一定的概率,所有行动的概率总和为1,那么玩家在特定情况下就会选择概率最高的一种行动,形式化来说,就是选择:

这个公式的结果。可以看到这个条件概率还是比较复杂的,给定的条件比较复杂,我们需要对其做一定的化简。这里可以使用蛇棋中的状态之间无依赖的性质,也就是说,当前选择什么行动只和当前的状态有关,和前面的状态无关。这一点比较容易理解,如果我这一步在“55”,那么我只需要考虑55前面有什么情况就好,至于我从“1”如何走到“55”,这些并不需要我们关心,我们的目标十分明确,那就是尽快从“55”移动到“100”,于是上面的公式就变成了

这样问题就得到了简化。对于策略部分,我们要实现一个映射,使得对于每一个状态,我们能找到一个最优的行动方式。
下面一步就是环境了。当完成了行动确定后,这一步要完成真正的状态转移。这里也非常明显,下一步的状态并不受前一步状态影响,于是这里的状态转换就可以定义为:
比方说我们在“55”这个位置,我们如果选定“1-3”的骰子,假设骰子投掷结果是“均匀”的,那么接下来我们的棋子将以等概率出现在“56”,“57”,“58”这三个格子中。但是由于梯子的存在,落在这三个格子中的棋子可能会到达其他位置,所以实际当中我们需要考虑每一个格子到所有格子的概率。
了解了这两个过程,我们就可以重新看看MDP这个词了。马尔可夫决策过程包含了两层含义,其中的“马尔可夫”表示了状态间的依赖性,下一个状态只和前一个状态产生依赖,并不和更早的状态产生联系;而“决策”表示了其中的策略部分将有玩家决定,而其他部分保持随机性;而“过程”表示了时间的属性,每一轮的操作都将时间向前推进,状态更新,行动产生,然后状态再更新……
了解了这些,我们就来看看代码如何实现吧,下面这个函数展示了由蛇棋类提供的状态转换的表格的代码:
def state_transition_table(self):
table = np.zeros((len(self.dice_ranges), 101, 101))
ladder_move = np.vectorize(lambda x: self.ladders[x] if x in self.ladders else x)
for i, dice in enumerate(self.dice_ranges):
prob = 1.0 / dice
for s in range(1, 100):
step = np.arange(dice)
step += s
step = np.piecewise(step, [step > 100, step <= 100], [lambda x: 200 - x, lambda x: x])
step = ladder_move(step)
for final_move in step:
table[i, s, final_move] += prob
table[:,100, 100]=1
return table
2.2 状态与行动的评估
前面介绍了MDP,其实游戏的关键在于策略,如何行动。每一个行动一定需要一个行动准则,也就是说我们要能够量化某一个状态或者某一个行动的价值,这样才好让玩家做出明智的判断。所以接下来一个重要的工作就是量化这些价值。
幸运的是,模型已经帮助我们完成了最重要的一步——它提供了可以量化的某一时刻的反馈reward。虽然这和我们最终的目标有些不同,但是我们可以将其扩展使之称为我们的目标。前面我们已经提到,当我们落在非终点的位置上时,reward=-1,当我们落在终点时,reward=100。于是这部分内容也可以写成代码的形式:
def reward_table(self):
table = np.array([-1] * 101)
table[100] = 100
return table
到这里,我们有个状态转移的信息,有了每一步行动后的reward,可以说,基本的信息已经充足了。那么现在就可以求出我们的最优策略了么?还不行,现在的计算还不够方便。前面提到我们的策略是要将这个公式最大化:
这个公式并不是很容易计算的,如果时间轴是有限的,也就是说我们可以在有限步完成游戏,那么这个公式是可以计算的,但如果游戏有可能无限进行下去呢?比方说每次快到”100"这个位置时,投掷的骰子数目都很大,导致永远无法正好到达“100”这个位置?那么在这种情况下,我们就不能直接用上面的公式了。为了解决这个问题,我们要对降低未来回报对当期的影响,也就是对未来的回报乘以一个打折率。所以修正后的公式变成了:

那么这个公式形式和现实有什么对应呢?最直接的对应就是商业银行的储蓄了。我们知道把钱存入银行,银行是可以支付利息的(当然有时也有负利息)。我们假设银行的年利率是10%(现实中恐怕很难见到),于是我们存入100元,一年后它就变成了110元。如果我们希望一年后它变成100元,那么现在需要存入多少钱呢?大概是90.9元,这个数字比100元小一些。把这个思想搬过来,对于未来可以获得的某个Reward,换算到当下是要打折的。这个打折率一般来说是小于1的,这样一来长期回报的这个数列的和就变得有限了,只要有限我们就可以计算了。
解决了长期回报的可表示问题,下面一个问题是:能不能用一个数值表示这个公式呢?于是我们需要定义另外一个变量——长期回报(Return)。所谓的长期回报,是将当前状态以后所有的Reward全部加起来,得到一个汇总的值。有了这个值,我们就可以衡量每一个策略的价值(Value)了。每一个策略都对应着一种行动,行动过后,对应的Reward以及Return就能够估计出来,由于不同的行动对应着不用的Return,每种行动的高下可以进行比较,于是策略间的价值也就可以评估了。
根据MDP的模型形式,价值函数可以分为两种类型:
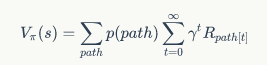
- 状态价值函数 V_{\pi}(s) :也就是求出当前状态s下按照某种策略的期望Return。
- 状态-行动价值函数 q_{\pi}(s,a) :也就是求出当前状态s和行动a已知后,按照某种策略的期望Return。
这两种函数有什么关系么?下面就将这两个函数的形式展现出来。某个状态的价值函数,相当于依从某个策略把所有从这个状态出发的可能路径走一遍,将这些路径的长期回报进行”加权平均“,由于路径是无限的,因此这个过程相当于求期望:
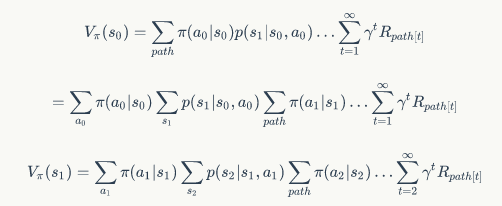
由于增强学习的过程是一个马尔可夫决策过程,于是路径部分可以展开:
V_{\pi}(s)=\sum_{path}\pi(a_0|s_0)p(s_1|s_0,a_0)…\sum_{t=1}^{\infty} \gamma^t R_{path[t]}
这样的公式形式显然不够优雅,于是我们使用高中时使用的代换消元法,就可以得到:

两式相融合,再经过一些变换,可以得到:

公式中的 R_1 表示了到达下一状态时获得的Reward。通过这样的计算,我们发现状态价值函数是可以完成自我计算的。任意一个状态的价值可以由其他状态的价值得到,这个公式就被称为Bellman公式,是下面进行策略求解的基础公式之一。之所以被称为”之一“,是因为状态-行动价值函数同样有一个类似的公式:

这两个公式可以说是整个增强学习理论的基石,读者务必要对其有深入的了解。
2.3 表格版Agent
说了这么多,下面回到正题。我们的目标是针对一个问题,找到使其可以实现长期回报最大化的策略。对于蛇棋这样的问题,我们可以采用”做表格“的方式进行计算。所谓的做表格,就是将每一个状态相关的信息都进行单独计算单独考虑,不做汇总归纳。以下是我们的表格版Agent的初始化代码:
class TableAgent:
def __init__(self, state_transition_table, reward_table):
self.table = state_transition_table
self.reward = reward_table
self.state_num = self.table.shape[1]
self.act_num = self.table.shape[0]
self.policy = np.zeros(self.state_num, dtype=np.int)
self.value_pi = np.zeros((self.state_num))
self.value_q = np.zeros((self.state_num, self.act_num))
self.gamma = 0.8
可以看出,一个Agent需要知道以下的信息:
- 蛇棋中的状态转移情况:这是一个三维的数组,也就是存储的结构
- 蛇棋中的Reward记录:这是一个一维数组
- 蛇棋的状态数目:100个
- 蛇棋的行动数目:看个人手法决定(\微笑\微笑)
- 策略:我们会为每一个状态最终选择一个最优行动,如果有两个行动同时最优,那么会任选一个
- 状态价值函数
- 状态-行动价值函数
- 打折率
到此为止,初始化就结束了。最后让我们一起明确一下求解最优策略的思路。前面说过,给定某个状态,求解最优策略,相当于求解:
将其中的策略变量摘掉,可以认为,对于任意的状态,求解

也就是说,为了求解行动,我们要先知道价值函数。
而价值函数的定义,在前面已经介绍了,它是在策略确定的时候计算得到的。嗯,听上去好像有点矛盾了……我们把这个问题交给下一节去解决。
广告时间
我的书《深度学习轻松学:核心算法与视觉实践》,感谢支持!
我爱机器学习13群:550972653,欢迎加入~
