
从 SGD 到 Adam —— 深度学习优化算法概览(一)


楔子
前些日在写计算数学课的期末读书报告,我选择的主题是「分析深度学习中的各个优化算法」。在此前的工作中,自己通常就是无脑「Adam 大法好」,而对算法本身的内涵不知所以然。一直希望能抽时间系统的过一遍优化算法的发展历程,直观了解各个算法的长处和短处。这次正好借着作业的机会,补一补课。
本文主要借鉴了 @Juliuszh 的文章[1]思路,使用一个 general 的框架来描述各个梯度下降变种算法。实际上,本文可以视作对[1]的重述,在此基础上,对原文描述不够详尽的部分做了一定补充,并修正了其中许多错误的表述和公式。
另一主要参考文章是 Sebastian Ruder 的综述[2]。该文十分有名,大概是深度学习优化算法综述中质量最好的一篇了。建议大家可以直接阅读原文。本文许多结论和插图引自该综述。
对优化算法进行分析和比较的文章已有太多,本文实在只能算得上是重复造轮,旨在个人学习和总结。希望对优化算法有深入了解的同学可以直接查阅文末的参考文献。
引言
最优化问题是计算数学中最为重要的研究方向之一。而在深度学习领域,优化算法的选择也是一个模型的重中之重。即使在数据集和模型架构完全相同的情况下,采用不同的优化算法,也很可能导致截然不同的训练效果。
梯度下降是目前神经网络中使用最为广泛的优化算法之一。为了弥补朴素梯度下降的种种缺陷,研究者们发明了一系列变种算法,从最初的 SGD (随机梯度下降) 逐步演进到 NAdam。然而,许多学术界最为前沿的文章中,都并没有一味使用 Adam/NAdam 等公认“好用”的自适应算法,很多甚至还选择了最为初级的 SGD 或者 SGD with Momentum 等。
本文旨在梳理深度学习优化算法的发展历程,并在一个更加概括的框架之下,对优化算法做出分析和对比。
Gradient Descent
梯度下降是指,在给定待优化的模型参数 \theta \in \mathbb{R}^d 和目标函数 J(\theta) 后,算法通过沿梯度 \nabla_\theta J(\theta) 的相反方向更新 \theta 来最小化 J(\theta) 。学习率 \eta 决定了每一时刻的更新步长。对于每一个时刻 t ,我们可以用下述步骤描述梯度下降的流程:
(1) 计算目标函数关于参数的梯度
g_t = \nabla_\theta J(\theta)
(2) 根据历史梯度计算一阶和二阶动量
m_t = \phi(g_1, g_2, \cdots, g_t)
v_t = \psi(g_1, g_2, \cdots, g_t)
(3) 更新模型参数
\theta_{t+1} = \theta_t - \frac{1}{\sqrt{v_t + \epsilon}} m_t
其中, \epsilon 为平滑项,防止分母为零,通常取 1e-8。
Gradient Descent 和其算法变种
根据以上框架,我们来分析和比较梯度下降的各变种算法。
Vanilla SGD
朴素 SGD (Stochastic Gradient Descent) 最为简单,没有动量的概念,即
m_t = \eta g_t
v_t = I^2
\epsilon = 0
这时,更新步骤就是最简单的
\theta_{i+1}= \theta_t - \eta g_t
SGD 的缺点在于收敛速度慢,可能在鞍点处震荡。并且,如何合理的选择学习率是 SGD 的一大难点。
Momentum
SGD 在遇到沟壑时容易陷入震荡。为此,可以为其引入动量 Momentum[3],加速 SGD 在正确方向的下降并抑制震荡。
m_t = \gamma m_{t-1} + \eta g_t
SGD-M 在原步长之上,增加了与上一时刻步长相关的 \gamma m_{t-1} ,\gamma 通常取 0.9 左右。这意味着参数更新方向不仅由当前的梯度决定,也与此前累积的下降方向有关。这使得参数中那些梯度方向变化不大的维度可以加速更新,并减少梯度方向变化较大的维度上的更新幅度。由此产生了加速收敛和减小震荡的效果。
从图 1 中可以看出,引入动量有效的加速了梯度下降收敛过程。
Nesterov Accelerated Gradient
更进一步的,人们希望下降的过程更加智能:算法能够在目标函数有增高趋势之前,减缓更新速率。
NAG 即是为此而设计的,其在 SGD-M 的基础上进一步改进了步骤 1 中的梯度计算公式:
g_t = \nabla_\theta J(\theta - \gamma m_{t-1})
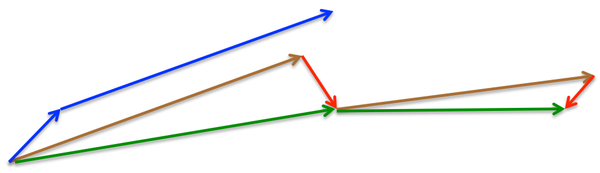
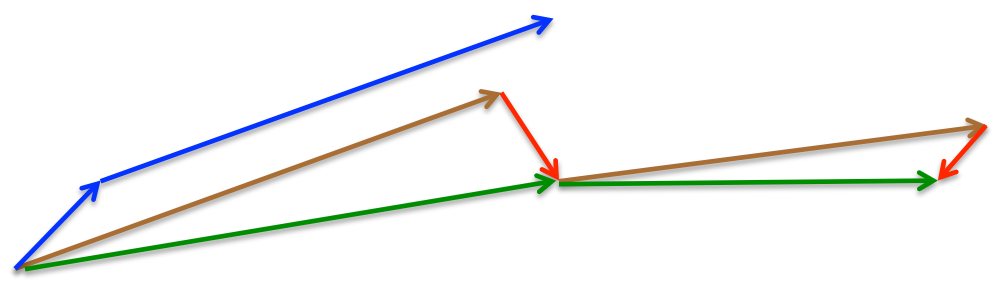
参考图 2,SGD-M 的步长计算了当前梯度(短蓝向量)和动量项 (长蓝向量)。然而,既然已经利用了动量项来更新 ,那不妨先计算出下一时刻 \theta 的近似位置 (棕向量),并根据该未来位置计算梯度(红向量),然后使用和 SGD-M 中相同的方式计算步长(绿向量)。这种计算梯度的方式可以使算法更好的「预测未来」,提前调整更新速率。
Adagrad
SGD、SGD-M 和 NAG 均是以相同的学习率去更新 \theta 的各个分量。而深度学习模型中往往涉及大量的参数,不同参数的更新频率往往有所区别。对于更新不频繁的参数(典型例子:更新 word embedding 中的低频词),我们希望单次步长更大,多学习一些知识;对于更新频繁的参数,我们则希望步长较小,使得学习到的参数更稳定,不至于被单个样本影响太多。
Adagrad[4] 算法即可达到此效果。其引入了二阶动量:
v_t = \text{diag}(\sum_{i=1}^t g_{i,1}^2, \sum_{i=1}^t g_{i,2}^2, \cdots, \sum_{i=1}^t g_{i,d}^2)
其中, v_t \in \mathbb{R}^{d\times d} 是对角矩阵,其元素 v_{t, ii} 为参数第 i 维从初始时刻到时刻 t 的梯度平方和。
此时,可以这样理解:学习率等效为 \eta / \sqrt{v_t + \epsilon} 。对于此前频繁更新过的参数,其二阶动量的对应分量较大,学习率就较小。这一方法在稀疏数据的场景下表现很好。
RMSprop
在 Adagrad 中, v_t 是单调递增的,使得学习率逐渐递减至 0,可能导致训练过程提前结束。为了改进这一缺点,可以考虑在计算二阶动量时不累积全部历史梯度,而只关注最近某一时间窗口内的下降梯度。根据此思想有了 RMSprop[5]。记 g_t \odot g_t 为 g_t^2 ,有
v_t = \gamma v_{t-1} + (1-\gamma) \cdot \text{diag}(g_t^2)
其二阶动量采用指数移动平均公式计算,这样即可避免二阶动量持续累积的问题。和 SGD-M 中的参数类似,\gamma 通常取 0.9 左右。
Adadelta
待补充
Adam
Adam[6] 可以认为是 RMSprop 和 Momentum 的结合。和 RMSprop 对二阶动量使用指数移动平均类似,Adam 中对一阶动量也是用指数移动平均计算。
m_t = \eta[ \beta_1 m_{t-1} + (1 - \beta_1)g_t ]
v_t = \beta_2 v_{t-1} + (1-\beta_2) \cdot \text{diag}(g_t^2)
其中,初值
m_0 = 0
v_0 = 0
注意到,在迭代初始阶段,m_t 和 v_t 有一个向初值的偏移(过多的偏向了 0)。因此,可以对一阶和二阶动量做偏置校正 (bias correction),
\hat{m}_t = \frac{m_t}{1-\beta_1^t}
\hat{v}_t = \frac{v_t}{1-\beta_2^t}
再进行更新,
\theta_{t+1} = \theta_t - \frac{1}{\sqrt{\hat{v}_t} + \epsilon } \hat{m}_t
可以保证迭代较为平稳。
NAdam
NAdam[7] 在 Adam 之上融合了 NAG 的思想。
首先回顾 NAG 的公式,
g_t = \nabla_\theta J(\theta_t - \gamma m_{t-1})
m_t = \gamma m_{t-1} + \eta g_t
\theta_{t+1} = \theta_t - m_t
NAG 的核心在于,计算梯度时使用了「未来位置」\theta_t - \gamma m_{t-1}。NAdam 中提出了一种公式变形的思路[7],大意可以这样理解:只要能在梯度计算中考虑到「未来因素」,即能达到 Nesterov 的效果;既然如此,那么在计算梯度时,可以仍然使用原始公式 g_t = \nabla_\theta J(\theta_t) ,但在前一次迭代计算 \theta_t 时,就使用了未来时刻的动量,即 \theta_t = \theta_{t-1} - m_t ,那么理论上所达到的效果是类似的。
这时,公式修改为,
g_t = \nabla_\theta J(\theta_t)
m_t = \gamma m_{t-1} + \eta g_t
\bar{m}_t = \gamma m_t + \eta g_t
\theta_{t+1} = \theta_t - \bar{m}_t
理论上,下一刻的动量为 m_{t+1} = \gamma m_t + \eta g_{t+1},在假定连续两次的梯度变化不大的情况下,即 g_{t+1} \approx g_t,有 m_{t+1} \approx \gamma m_t + \eta g_t \equiv \bar{m}_t。此时,即可用 \bar{m}_t 近似表示未来动量加入到 \theta 的迭代式中。
类似的,在 Adam 可以加入 \bar{m}_t \leftarrow \hat{m}_t 的变形,将 \hat{m}_t 展开有
\hat{m}_t = \frac{m_t}{1-\beta_1^t} = \eta[ \frac{\beta_1 m_{t-1}}{1-\beta_1^t} + \frac{(1 - \beta_1)g_t}{1-\beta_1^t} ]
引入
\bar{m}_t = \eta[ \frac{\beta_1 m_{t}}{1-\beta_1^{t+1}} + \frac{(1 - \beta_1)g_t}{1-\beta_1^t} ]
再进行更新,
\theta_{t+1} = \theta_t - \frac{1}{\sqrt{\hat{v}_t} + \epsilon } \bar{m}_t
即可在 Adam 中引入 Nesterov 加速效果。
可视化分析
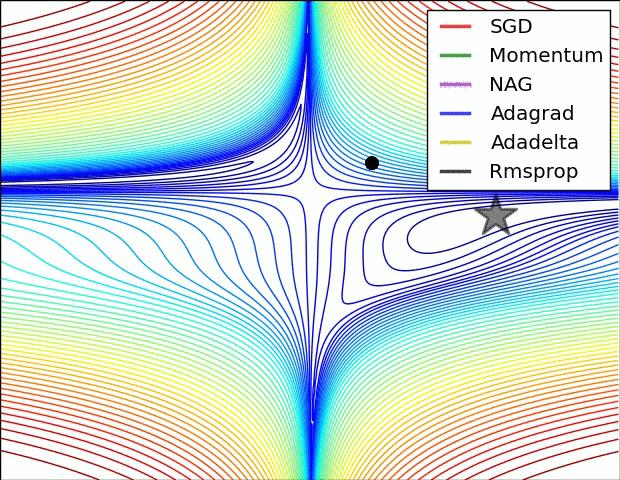
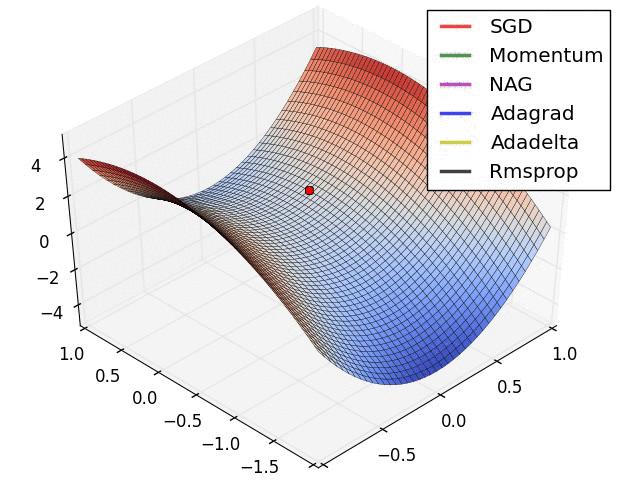
图 3 和图 4 两张动图直观的展现了不同算法的性能。(Image credit: Alec Radford)
图 3 中,我们可以看到不同算法在损失面等高线图中的学习过程,它们均同同一点出发,但沿着不同路径达到最小值点。其中 Adagrad、Adadelta、RMSprop 从最开始就找到了正确的方向并快速收敛;SGD 找到了正确方向但收敛速度很慢;SGD-M 和 NAG 最初都偏离了航道,但也能最终纠正到正确方向,SGD-M 偏离的惯性比 NAG 更大。
图 4 展现了不同算法在鞍点处的表现。这里,SGD、SGD-M、NAG 都受到了鞍点的严重影响,尽管后两者最终还是逃离了鞍点;而 Adagrad、RMSprop、Adadelta 都很快找到了正确的方向。
关于两图的讨论,也可参考[2]和[8]。
可以看到,几种自适应算法在这些场景下都展现了更好的性能。
讨论、选择策略
读书报告中的讨论内容较为杂乱,该部分待整理完毕后再行发布。
References
[1] Adam那么棒,为什么还对SGD念念不忘 (1) —— 一个框架看懂优化算法
[2] An overview of gradient descent optimization algorithms
[3] On the momentum term in gradient descent learning algorithms
[4] Adaptive Subgradient Methods for Online Learning and Stochastic Optimization
[5] CSC321 Neural Networks for Machine Learning - Lecture 6a
[6] Adam: A Method for Stochastic Optimization
[7] Incorporating Nesterov Momentum into Adam
[8] CS231n Convolutional Neural Networks for Visual Recognition
