
判别模型与生成模型,概率模型与非概率模型、参数模型与非参数模型总结

原文:监督学习的分类:判别模型与生成模型,概率模型与非概率模型、参数模型与非参数模型
文章结构如下:
1: 判别模型 VS 生成模型
- 1.1 判别模型
- 1.2 生成模型
2: 非概率模型 VS 概率模型
- 2.1 非概率模型
- 2.2 概率模型
3: 参数模型 VS 非参数模型
- 3.1 参数模型
- 3.2 非参数模型
问题设定:
假设输入空间(特征空间)为欧几里得空间 X ,维数是 d ,我们主要考虑二分类问题,所以输出空间设定为 Y(Y=\{-1,1\}) 。 x 代表输入空间中的一个随机向量, y 代表输出空间中的一个随机变量。 P(x,y) 是 x 与 y 的联合分布,我们并不知道这个联合分布的形式,但由这个分布产生了 m 个样例,构成我们的训练集 D ,
D=\{x^{(i)},y^{(i)}\}_{i=1}^{m}\\
1: 判别模型 VS 生成模型
1.1 判别模型
判别模型分为两种:
(1)直接对输入空间到输出空间的映射进行建模,也就是学习函数 h :
h:X\rightarrow Y,s.t.y=h(x)\\
(2)对条件概率 P(y|x) 进行建模,然后根据贝叶斯风险最小化的准则进行分类:
y=arg\underset{y\in\{-1,1\}}{max}P(y|x)\\
感知机、逻辑斯特回归、支持向量机、神经网络、k近邻都属于判别学习模型。
1.2 生成模型
生成模型是间接地,先对 P(x,y) 进行建模,再根据贝叶斯公式:
P(y|x)=\frac{P(x|y)P(y)}{P(x)}\\
算出 P(y|x) ,最后根据 arg\underset{y\in\{-1,1\}}{max}P(y|x) 来做分类 (由此可知,判别模型实际上不需要对 P(x,y) 进行建模)。
2: 非概率模型 VS 概率模型
2.1 非概率模型
非概率模型指的是直接学习输入空间到输出空间的映射 h ,学习的过程中基本不涉及概率密度的估计,概率密度的积分等操作,问题的关键在于最优化问题的求解。通常,为了学习假设 h(x) ,我们会先根据一些先验知识(prior knowledge) 来选择一个特定的假设空间 H (函数空间),例如一个由所有线性函数构成的空间,然后在这个空间中找出泛化误差最小的假设出来,
h^{*}=arg~\underset{h\in H}{min}~\varepsilon (h)=arg~\underset{h\in H}{min}~\sum_{x,y}l(h(x),y)P(x,y)\\
其中 l(h(x),y) 是我们选取的损失函数,选择不同的损失函数,得到假设的泛化误差就会不一样。由于我们并不知道 P(x,y) ,所以即使我们选好了损失函数,也无法计算出假设的泛化误差,更别提找到那个给出最小泛化误差的假设。于是,我们转而去找那个使得经验误差最小的假设,
g=arg~\underset{h\in H}{min}~\hat{\varepsilon} (h)=arg~\underset{h\in H}{min}~\frac{1}{m}\sum_{i=1}^{m}l(h(x^{(i)}),y^{(i)})\\
这种学习的策略叫经验误差最小化(ERM),理论依据是大数定律:当训练样例无穷多的时候,假设的经验误差会依概率收敛到假设的泛化误差。要想成功地学习一个问题,必须在学习的过程中注入先验知识。前面,我们根据先验知识来选择假设空间,其实,在选定了假设空间后,先验知识还可以继续发挥作用,这一点体现在为我们的优化问题加上正则化项上,例如常用的 L1 正则化, L2 正则化等。
g=arg~\underset{h\in H}{min}~\hat{\varepsilon} (h)=arg~\underset{h\in H}{min}~\frac{1}{m}\sum_{i=1}^{m}l(h(x^{(i)}),y^{(i)})+\lambda \Omega (h)\\
正则化项一般是对模型的复杂度进行惩罚,例如我们的先验知识告诉我们模型应当是稀疏的,这时我们会选择 L1 范数。当然,加正则化项的另一种解释是为了防止对有限样例的过拟合,但这种解释本质上还是根据先验知识认为模型本身不会太复杂。在经验误差的基础上加上正则化项,同时最小化这两者,这种学习的策略叫做结构风险最小化(SRM)。最后,学习算法 A 根据训练数据集 D ,从假设空间中挑出一个假设 g ,作为我们将来做预测的时候可以用。具体来说,学习算法 A 其实是一个映射,对于每一个给定的数据集 D ,对于选定的学习策略(ERM or SRM),都有确定的假设与 D 对应
A:Dx \mapsto h,s.t.h=A(D)\\
感知机、支持向量机、神经网络、k近邻都属于非概率模型。线性支持向量机可以显式地写出损失函数——hinge损失。神经网络也可以显式地写出损失函数——平方损失。
时下流行的迁移学习,其中有一种迁移方式是基于样本的迁移。这种方式最后要解决的问题就是求解一个加权的经验误差最小化问题,而权重就是目标域与源域的边际密度之比。所以,线性支持向量机在迁移学习的环境下可以进行直接的推广。
2.2 概率模型
概率模型指出了学习的目的是学出 P(x,y) 或 P(y|x),但最后都是根据 arg\underset{y\in\{-1,1\}}{max}P(y|x) 来做判别归类。对于 P(x,y) 的估计,一般是根据乘法公式 P(x,y) = P(x|y)P(y) 将其拆解成 P(x|y),P(y) 分别进行估计。无论是对 P(x|y),P(y) 还是 P(y|x) 的估计,都是会先假设分布的形式,例如逻辑斯特回归就假设了 Y|X 服从伯努利分布。分布形式固定以后,剩下的就是分布参数的估计问题。常用的估计有极大似然估计(MLE)和极大后验概率估计(MAP)等。其中,极大后验概率估计涉及到分布参数的先验概率,这为我们注入先验知识提供了途径。逻辑斯特回归、高斯判别分析、朴素贝叶斯都属于概率模型。
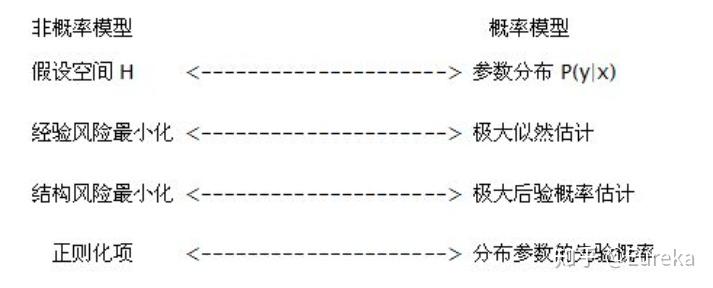
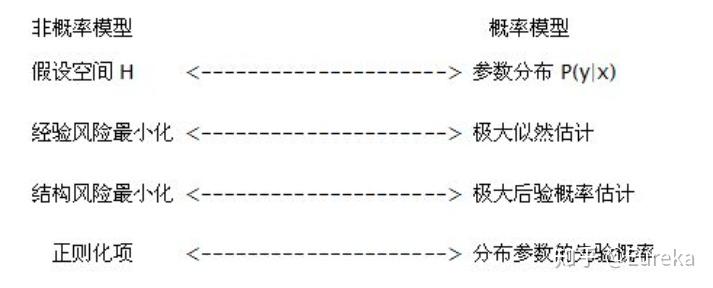
在一定的条件下,非概率模型与概率模型有以下对应关系:
3: 参数模型 VS 非参数模型
3.1 参数模型
如果我们对所要学习的问题有足够的认识,具备一定的先验知识,此时我们一般会假定要学习的目标函数 f(x) 或分布 P(y|x) 的具体形式。然后,通过训练数据集,基于ERM、SRM、MLE、MAP等学习策略,可以估计出 f(x) 或 P(y|x) 中含有的未知参数。一旦未知参数估计完毕,训练数据一般来说,就失去其作用了,因为这些估计出来的参数就是训练数据的浓缩。通过这种方式建立起来的模型就是参数模型。参数模型的一个很重要的特点是,如果对于模型的假设正确,那么只需要很少的训练数据就可以从假设空间中学出一个很好的模型。但是,如果模型的假设错误,那么无论训练的数据量有多大,甚至趋于无穷大,学出的模型都会与实际模型出现不可磨灭的偏差。感知机、逻辑斯特回归、高斯判别分析、朴素贝叶斯、线性支持向量机都属于参数模型。对于神经网络来说,当固定了隐层的数目以及每一层神经元的个数,它也属于参数模型。但由于隐层数目与每一层神经元个数的不确定性,很多时候,神经网络都被归类为半参数模型。
3.2 非参数模型
当我们对所要学习的问题知之甚少,此时我们一般不会对潜在的模型做过多的假设。在面对预测任务的时候,我们通常会用上所有的训练数据。例如简单的核密度估计(KDE)的表达式中,就带有所有训练数据的信息。通过这种方式建立的模型就是非参数模型。非参数模型的一个很重要的特点就是:let the data speak for itself. 正因为如此,非参数模型的存储开销、计算开销都会比参数模型大的多。但是,由于不存在模型的错误假定问题,可以证明,当训练数据量趋于无穷大的时候,非参数模型可以逼近任意复杂的真实模型(在评论区周天元指出没有普世的非参数模型的任意逼近性质的证明,在这方面作者并没有深入了解,因此读者还请自己查询相关资料,对周天元表示感谢)。这正是非参数模型诱人的一点。另外需要说明的一点是,非参数模型之所以叫做非参数,并不是因为模型中没有参数。实际上,非参数模型中一般会含有一个或多个超参数,外加无穷多个普通的参数。 k 近邻就是典型的非参数模型。
时下流行的深度学习,其本质是一个半参数模型的神经网络。通过加大网络的深度(加大隐层数目)以及宽度(增加每一层神经元的个数),使假设空间的复杂度得到极大的提高。复杂的假设空间有极强的表达能力,当训练数据量很大的时候,不会陷入过拟合。所以,深度学习的成功,从理论上讲,一方面来源于海量的训练数据,另一方面来源于其复杂的网络结构。
