强化学习基础概念篇

众所周知,当AlphaGO战胜了世界围棋冠军李世石之后,整个工业界都为之振奋,越来越多的学者意识到强化学习在人工智能领域是一个非常令人exciting的。在此我就分享一下本人的强化学习学习笔记。
强化学习基本概念
机器学习可以分为三类,分别是 supervised learning,unsupervised learning 和reinforcement learning。而强化学习与其他机器学习不同之处为:
- 没有监督信号,也没有label。只有reward,其实reward就相当于label。
- 反馈有延时,不是能立即返回。
- 相当于输入数据是序列数据。
- agent执行的动作会影响之后的数据。
强化学习的关键要素有:environment,reward,action 和 state。有了这些要素我们就能建立一个强化学习模型。强化学习解决的问题是,针对一个具体问题得到一个最优的policy,使得在该策略下获得的reward最大。所谓的policy其实就是一系列action。也就是sequential data。
强化学习可用下图来刻画,都是要先从要完成的任务提取一个环境,从中抽象出状态(state) 、动作(action)、以及执行该动作所接受的瞬时奖赏(reward)。
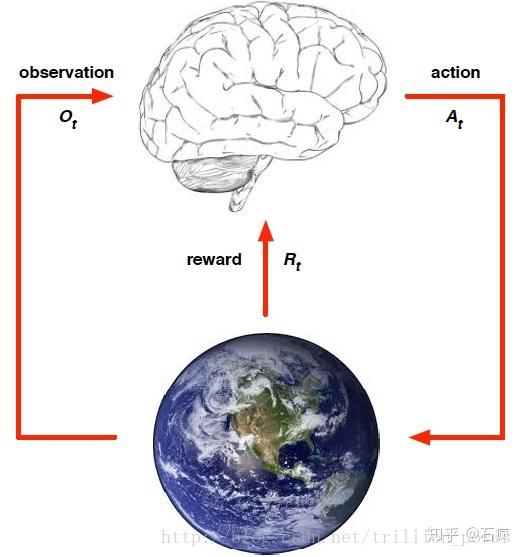

reward
reward通常都被记作Rt,表示第t个time step的返回奖赏值。所有强化学习都是基于reward假设的。reward是一个scalar。
action
action是来自于动作空间,agent对每次所处的state用以及上一状态的reward确定当前要执行什么action。执行action要达到最大化期望reward,直到最终算法收敛,所得的policy就是一系列action的sequential data。
state
就是指当前agent所处的状态。具体来讲,例如玩pong游戏(Atari的游戏),

该游戏的状态就是当前time step下小球的位置。而Flappy bird状态就是当前小鸟在平面上的位置。

policy
policy就是只agent的行为,是从state到action的映射,分为确定策略和与随机策略,确定策略就是某一状态下的确定动作a=π(s), 随机策略以概率来描述,即某一状态下执行这一动作的概率:π(a|s)=P[At=a|St=s]。
value function
因为强化学习今本上可以总结为通过最大化reward来得到一个最优策略。但是如果只是瞬时reward最大会导致每次都只会从动作空间选择reward最大的那个动作,这样就变成了最简单的贪心策略(Greedy policy),所以为了很好地刻画是包括未来的当前reward值最大(即使从当前时刻开始一直到状态达到目标的总reward最大)。因此就构造了值函数(value function)来描述这一变量。表达式如下:


γ是折扣系数(取值在[0,1][0,1]),就是为了减少未来的reward对当前动作的影响。然后就通过选取合适的policy使value function最大,稍后会为大家推导著名的bellman方程,bellman方程才是强化学习各大算法(e.g. 值迭代,策略迭代,Q-learning)的源头。
model
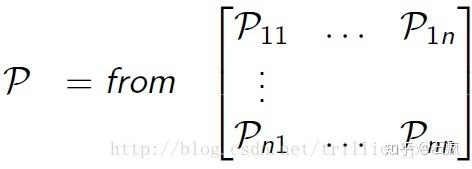
model就是用来预测环境接下来会干什么,即在这一状态的情况下执行某一动作会达到什么样的状态,这一个动作会得到什么reward。所以描述一个模型就是用动作转移概率与动作状态reward。具体公式如下:


马尔可夫决策过程(MDP)
大家应该都很熟悉马尔科夫过程,其实就是状态以及某状态的转移,最重要的就是一步转移概率矩阵,只要有了这个一步转移概率矩阵就能刻画整个马尔科夫过程。

下面就来介绍一下马尔可夫决策过程(MDP)它主要由以下几个变量来刻画,状态空间S(是一个有限集合),动作空间A(一个有限动作集合),状态转移概率矩阵P,奖赏函数R 以及折扣因子γ(γ∈[0,1]γ∈[0,1])。
下面介绍一个MDP常用的用来刻画奖赏的函数。
1.return Gt
t时刻之后未来执行一组action后能够获得的reward,即t+1,t+2…所有时刻的reward之和。(未来时刻的reward在当前时刻体现),后面的reward要乘以discountγγ 系数。表达式如下:


2.状态值函数v(s)
定义为t时刻状态S能获得的return的期望,表达式如下:

3.动作值函数qπ(s,a)
t时刻状态S下选择特定action后能获得的return的期望,表达式如下:


下面来讲解一下最著名的bellman方程的推导,首先推导如何迭代值函数,即更新值函数:
1.value function
强化学习学习笔记--介绍强化学习(reinforcement learning)
2.Q-value function
强化学习学习笔记--介绍强化学习(reinforcement learning)
有1与2的推导就可以得到著名的bellman方程,强化学习的算法迭代都是基于此方程的。如下:




这就是bellman方程,通常可以用一下方法求解bellman方程,如:值迭代、策略迭代、Q-learning、Sarsa等。
下面举一个例子:(状态图如下)
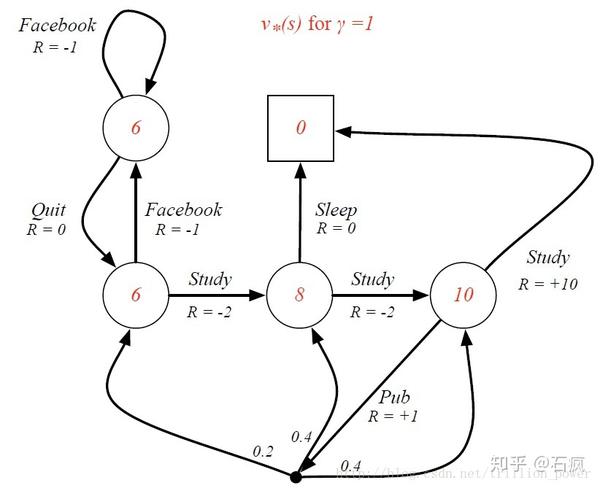
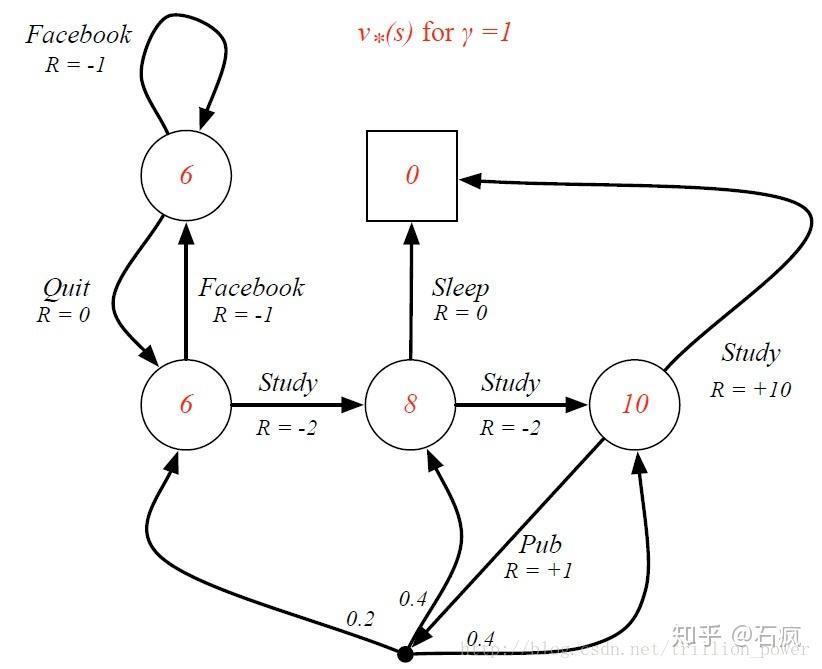
可通过bellman具体求得一个最佳策略。本人用matlab实现了以下,代码如下:
主函数:
clear
close all
clc
P = [0.9 0.1 0 0 0 0 0;
0.5 0 0.5 0 0 0 0;
0 0 0 0.8 0 0.2 0;
0 0 0 0 0.6 0 0.4;
0 0 0 0 0 1 0;
0 0 0 0 0 1 0;
0 0.2 0.4 0.4 0 0 0];
gamma = 1;
R = [-1 -2 -2 -2 10 0 1];
%% update iteration
maxiteration = 200;
V = zeros(size(P,2), maxiteration);
i = 1;
while i <= maxiteration
v = zeros(size(P,1),1);
for j = 1:7
v(j) = bellman_equ(gamma,P(j,:),R(j),V(:,i));
end
V(:,i+1) = v;
i = i+1;
end
plot(V'), title('MRP');
legend('Facebook','class1','class2','class3','pass','sleep','pub');
axis([0,210,-25,12])
grid on;
V(:,size(V,2))
bellman equation:
function v = bellman_equ(gamma,P,R,v_old)
v = R + gamma*P*v_old;
end