
OAK助力叉车智能化升级

官网www.oakchina.cn
频发的叉车事故
在美国每年会发生很多工业方面的事故,其中有1/6的事故来自于叉车事件约计有110,000件,所造成的直接经济成本损失高达135,000,000美元。


而在国内叉车事故的新闻也层出不穷,造成人员死亡的也不在少数。


叉车事故原因
企业内车辆事故有50%以上是与叉车叉货倒车行车有关,后方视觉盲区受阻,无法得知后方情况。

叉车作业货叉叉货时,正前方视线受阻,给驾驶员观察情况造成困难。
驾驶员正常情况下倒车行驶,由于车间、仓库的通道狭窄及叉车本身的因素,导致驾驶员在倒车行驶中视线受阻盲区较大,对于突发情况不能及时发现,导致发生倒车碰撞事故。

叉车恶性事故直接导致:产线暂停、重大赔偿、事故追责。
造成叉车事故的几大原因有:
- 倒车视线盲区大
- 超速驾驶
- 叉货前进视线被遮挡
- 疲劳驾驶
- 违规驾驶
OAK如何解决此类问题
系统架构
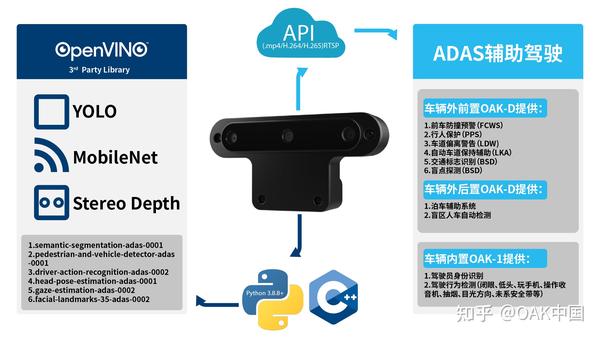

技术解析


- 前方盲区检测,辅助驾驶,人员,车道识别,三角锥识别,距离识别,车速识别。
- 后方盲区检测,辅助驾驶,人员,车道识别,三角锥识别。
- 驾驶身份识别,防止不合格驾驶员误操作,加强安全保护。驾驶行为检测,防止不安全驾驶行为,如使用手机、疲劳驾驶、低头、未按操作规程佩戴安全帽带等。


OAK的优势和性能
1、开发灵活度
| OAK+Openvino | 威盛 |
|---|---|
| OAK+Openvino开发框架非常简单,非常灵活。采用深度视觉测距+IMU测速+AI芯片神经推理整合在一起。用简单的openvino开发工具就能实现对几乎所有的神经网络的支持。 | 基于ARM的标准品,产品整合性比较高。但是二次开发不是特别灵活。 |
2、目标识别
| OAK+Openvino | 威盛 |
|---|---|
| OAK+Openvino的视觉智能识别,车前方或者后方的人可以只伸出一个手或者一个脑袋就能判断有人在,提前刹车。 视觉对物体的不同角度识别率变化不大。 | 和OAK的识别率应该差不多。但是OAK有4T算力,实时性理论上应该强一些 |
3、影像取证
| OAK+Openvino | 威盛 |
|---|---|
| 存有视频影像数据和深度视觉的物体坐标数据方便事故后期取证。 | 记录的视频和照片数据方便取证,不具备深度视觉数据。 |
4、恶劣天气
| OAK+Openvino | 威盛 |
|---|---|
| 视觉在恶劣天气,如大雾天识别度下降。 | 视觉在恶劣天气,如大雾天识别度下降。 |
5、车辆改造
| OAK+Openvino | 威盛 |
|---|---|
| OAK+Openvino纯视觉识别安全带,双目识别车速,不会对车辆进行任何改动。双目时差识别前后方物体同时,可以测距。IMU和视觉融合可以测量运动速度和运动轨迹。 | 安全带识别,和车速识别对车辆有轻微改动。 不具备测量运动轨迹的功能。 |
6、3D重建
| OAK+Openvino | 威盛 |
|---|---|
| OAK+Openvino的slam可以对室内环境进行3D重建。增加室内操作的全方位安全性。 | 无此项功能。 |
7、功耗
| OAK+Openvino | 威盛 |
|---|---|
| OAK边缘计算相机自带4T算力功耗2.5W,对主控计算机的算力没有要求。不需要后端配备高性能GPU计算机,普通平板电脑就可以。 | 未知。 |
8、设备和复杂度
| OAK+Openvino | 威盛 |
|---|---|
| 只需要OAK和支持PoE供电的触摸平板电脑,网线连接即可。 | 需要速度传感器,安全岛检测传感器,摄像头,主控计算机,显示屏等。 |
想买一个OAK?半价得最高性价比的OAK,活动持续到10月15日,淘宝搜索OAK-D-Lite,手快最多省200元。
活动详情&OAK-D-Lite介绍:
编辑于 2021-09-29 13:31
