
死磕陀螺仪之(一)陀螺仪参数意义以及工程转换

陀螺参数意义以及工程转换
最近在测量陀螺和配置相应的卡尔曼滤波参数,对之前没有弄清楚的问题重新探讨查询一番,特此记录下来。非专业且从工程应用角度。
陀螺的指标比较复杂,并且不同的厂家说法名字都不一样。工程上重要的有:零偏,零偏稳定性,零偏不稳定性,零偏重复性,角随机游走,速率噪声密度。
以下为个人理解,详情见附录1。
零偏(Bias):不多解释。
零偏稳定性(Bias stability,In-Run Bias Stability):衡量在一次上电过程中,零偏的变化,单位大多为°/h。是陀螺最为重要的指标,工程上常用一段时间采样平均值的标准差来衡量。但是平滑时间是不固定的,如果是光纤陀螺,平滑时间通常为10s,如果是激光陀螺,平滑时间通常为100s(注1),MEMS的平滑时间为10s。它体现的是陀螺仪的综合性能。
零偏不稳定性(Bias instability):单位大多为°/h,这个参数是用Allan方差计算的,是Allan方差的最低点,与陀螺的零偏稳定性单位相同,但是二者的数值没有固定的关系。
零偏重复性(Run-Run Bias Stability):单位大多为°/h,是衡量每一次陀螺上电的零偏的变化,测试时注意每一次上电之间的间隔要大一些,10-20min比较稳妥。
角度随机游走(Angular random walk,ARW):利用Allan方差来计算,单位为°/√h。工程上可以理解为衡量陀螺白噪声方差的一个量,二者有一定的换算关系。
速率噪声密度(Rate Noise Density,RND): 利用Allan方差来计算,单位为°/sec/√Hz。工程上可以理解为衡量陀螺白噪声方差的一个量,与角度随机游走相同二者有一定的换算关系。
角速度随机游走(Rate Random Walk,RRW):利用Allan方差来计算,单位为 °/ (h)^1.5。陀螺的角速率输出随着时间缓慢变化,通常由系统误差引起,比如环境温度的缓慢变化。可以用来衡量零偏的变化规律。
速率斜坡(Rate Ramp):利用Allan方差来计算,单位为 °/ (h)^2陀螺的角速率输出随着时间缓慢变化,通常由系统误差引起,比如环境温度的缓慢变化,可以通过严格的环境控制或引入补偿来降低此类误差。
参数之间的换算关系如下图:
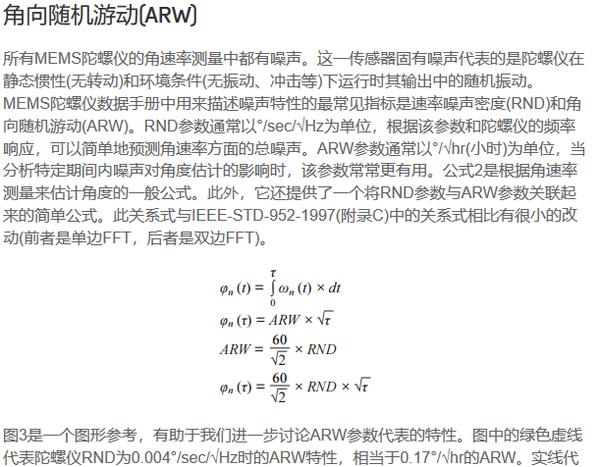

ARW与RND之间的换算关系(注2)
这里的换算参数不一定,如果是ADIS的陀螺,他的换算关系是60/√2,如果是其他的陀螺,则可能是60,大致在这二者之间。
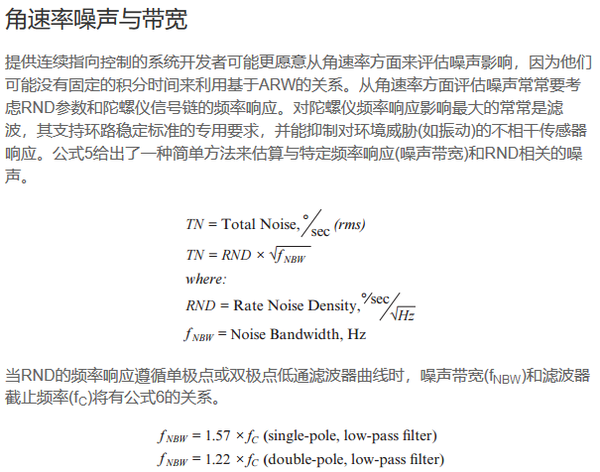

数据标准差与RND之间的关系(注2)
这个换算关系式非常重要,因为工程上很关注采样的白噪声,直接影响控制精度,这个关系式可以为陀螺的选型和滤波器设计提供依据,同样也可以反向验证陀螺指标。但是有一点并没有弄清楚,如果陀螺直接8Hz采样,没有滤波,那么式中的fNBW是否为4Hz呢???
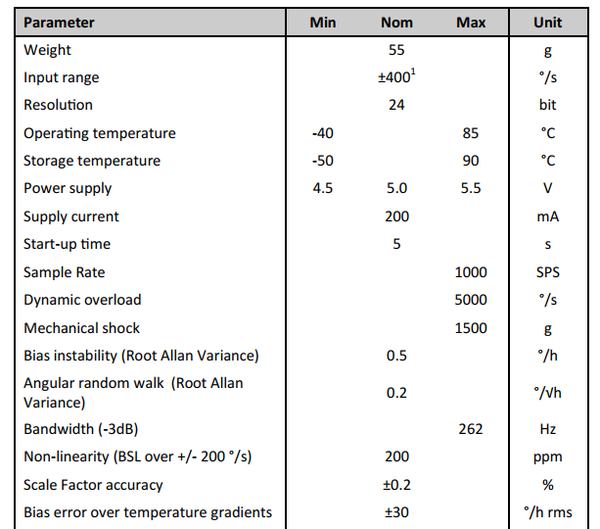
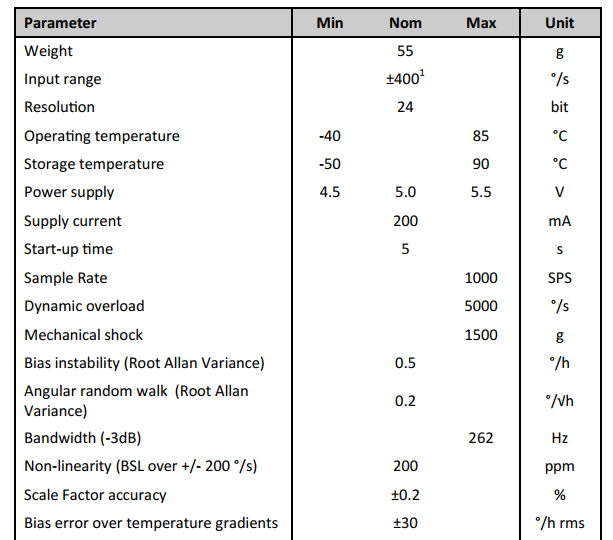
STIM202陀螺参数


ADIS16375陀螺指标参数
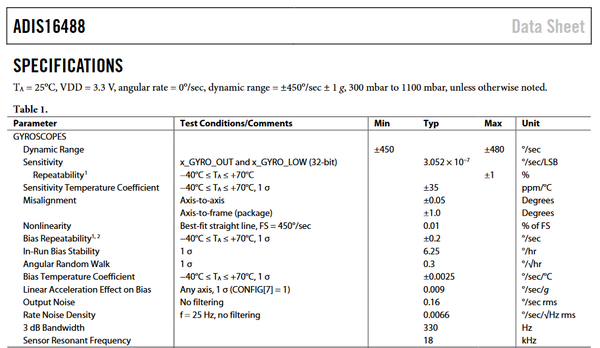

ADIS16488陀螺指标参数
利用手册中的参数来验证ARW和RND,发现还是比较准确的,测试陀螺采样值的std和RND之间的换算关系,发现经验公式也是比较准确的。
非专业,仅供工程参考,欢迎指正,多多讨论。
注1:http://bbs.81tech.com/forum.php?mod=viewthread&tid=227147
附录1:陀螺指标的专业解读,http://note.youdao.com/noteshare?id=69aa4921c6b564ab809565010e6c1455&sub=F4CB58938A984089981C85D9C1EBCE5D
附录二:ADIS公司有用的文档,http://note.youdao.com/noteshare?id=b7d45c0757e87a028649dd31be72d95e&sub=D283576BBB38409DA704F6775AFE030D
陀螺系列:
欢迎指正讨论,转载请注明,认同请点赞。
为什么那么多人都是只收藏不点赞不评论啊(表情捂脸哭)!
麻烦大家给我一个反馈。
