二十七-VIO-SLAM开源框架Vin-mono跑EuRoC数据集

专栏系列文章如下:
goldqiu:一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程
goldqiu:二.激光SLAM框架学习之A-LOAM框架---介绍及其演示
goldqiu:三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除主要源码部分)
goldqiu:四.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---2.scanRegistration.cpp--前端雷达处理和特征提取
goldqiu:五.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---3.laserOdometry.cpp--前端雷达里程计和位姿粗估计
goldqiu:六.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---4.laserMapping.cpp--后端建图和帧位姿精估计(优化)
goldqiu:七.激光SLAM框架学习之A-LOAM框架---速腾Robosense-16线雷达室内建图
goldqiu:八.激光SLAM框架学习之LeGO-LOAM框架---框架介绍和运行演示
goldqiu:九.激光SLAM框架学习之LeGO-LOAM框架---速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据
goldqiu:十.激光SLAM框架学习之LeGO-LOAM框架---算法原理和改进、项目工程代码
goldqiu:十一.激光惯导LIO-SLAM框架学习之LIO-SAM框架---框架介绍和运行演示
goldqiu:十二.激光SLAM框架学习之livox-loam框架安装和跑数据集
goldqiu:十三.激光SLAM框架学习之livox-Mid-70雷达使用和实时室外跑框架
goldqiu:十四.激光和惯导LIO-SLAM框架学习之惯导内参标定
goldqiu:十五.激光和惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)
goldqiu:十六.激光和惯导LIO-SLAM框架学习之配置自用传感器实时室外跑LIO-SAM框架
goldqiu:十七.激光和惯导LIO-SLAM框架学习之IMU和IMU预积分
goldqiu:十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析
goldqiu:十九.激光和惯导LIO-SLAM框架学习之LIO-SAM项目工程代码介绍---代码框架和一些文件解释
goldqiu:二十.激光、视觉和惯导LVIO-SLAM框架学习之相机内参标定
goldqiu:二十一.激光、视觉和惯导LVIO-SLAM框架学习之相机与雷达外参标定(1)
goldqiu:二十二.香港大学火星实验室R3LIVE框架跑官方数据集
goldqiu:二十三.激光和惯导LIO-SLAM框架学习之LIO-SAM项目工程代码介绍---基础知识
goldqiu:二十四-香港大学火星实验室FAST-LIO2框架跑官方数据集
goldqiu:二十五.SLAM中Mapping和Localization区别和思考
goldqiu:二十六-香港大学火星实验室FAST-LIO2框架跑自录数据集(Mid-70和SBG-Ellipse-N惯导)
VINS-Mono框架
VINS-Mono是HKUST的Shen Shaojie团队,华为2019天才少年秦通博士开源的一套Visual-Inertial融合定位算法,是用紧耦合方法实现的,通过单目+IMU恢复出尺度,效果很好。
官方github:
https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
按照要求安装环境:
sudo apt-get install ros-YOUR_DISTRO-cv-bridge ros-YOUR_DISTRO-tf ros-YOUR_DISTRO-message-filters ros-YOUR_DISTRO-image-transport需要安装Ceres Solver:
http://ceres-solver.org/installation.html
编译:
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash测试EuRoC MAV Dataset:
下载:
http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
百度云:
链接:https://pan.baidu.com/s/1BCgNJAuPbc7tjIpj_IfyVQ 提取码:lp9k
运行:
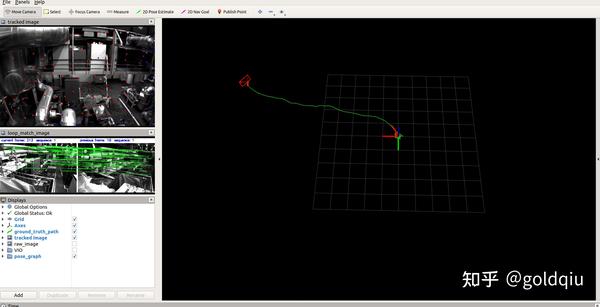
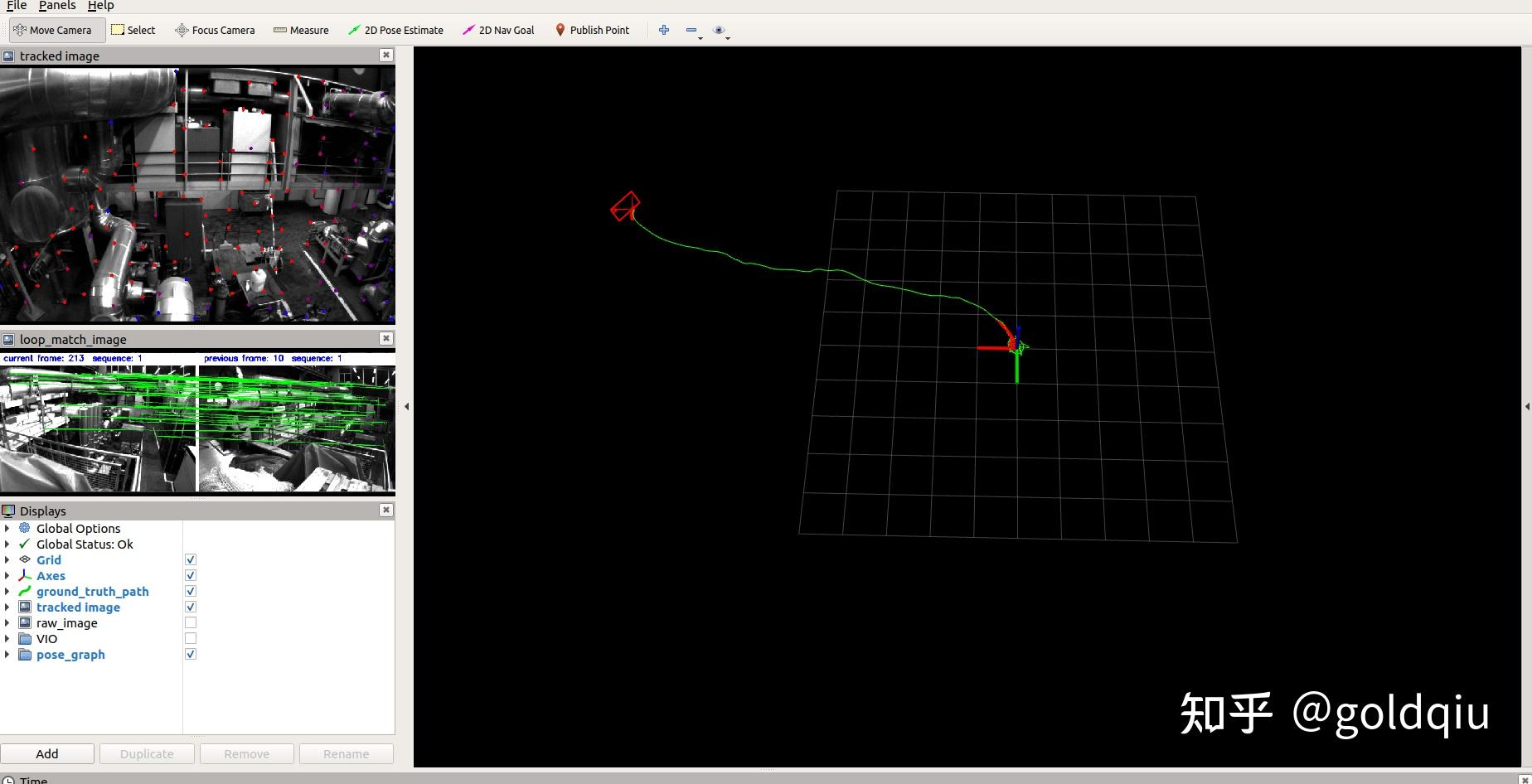
roslaunch vins_estimator euroc.launch
roslaunch vins_estimator vins_rviz.launch
rosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag 效果: