
自动驾驶学习资料合集
本文皆为网上公开资料,只用作个人学习用途,如有侵权请联系删除。
Hi all,Apollo学习笔记系列又更新了,我迁移到了readthedocs,下面是地址,现在排版更加自然,变得方便阅读和索引,虽然还有一些小问题,今年我会持续的更新文档,希望大家可以先体验下,下面是项目地址。
教学视频
1. 综合
- 百度和优达学城合作课程(入门推荐!!!)
- Apollo自动驾驶 - 百度技术学院
- 多伦多大学自动驾驶Coursera公开课
- MIT自动驾驶公开课
- MIT自动驾驶访谈(主要是一些业界大神的分享)
2. 地图&定位
3. 深度学习
- 吴恩达深度学习 -B站 (入门推荐!)
- 李宏毅机器学习 - B站 (入门推荐!)
4. 多目标追踪
5.多传感器融合
书籍
1. 综合
- 《无人驾驶原理与实践》 兰州大学的自动驾驶团队,作为我开始入门无人驾驶的书籍,值得推荐
- 《无人驾驶:人工智能如何颠覆汽车》 书比较薄,和上本类似,入门推荐
- 《第一本无人驾驶技术书》 入门推荐
- 《自动驾驶技术概论》 北京航空航天大学和百度自动驾驶事业群组联合编写
- 《概率机器人》 对概率机器人学这一新兴领域进行了全面的介绍,公式较多(经典推荐!)。
2. 地图&定位
- 《视觉SLAM十四讲》高精度地图和定位需要的基础知识(入门推荐!)
- 《机器人学中的状态估计》 机器人状态估计
- 《Computational Geometry》 计算几何介绍,主要用于地图库API
3. 感知
- 《深度学习》 深度学习领域奠基性的经典教材
- 《动手学深度学习》 偏实践,基础概念讲解的不错,但要注意使用的框架为keras
- 《机器学习》 西瓜书基础介绍,想了解深度学习之外更多机器学习的概念可以参考(入门推荐!)
- 《Pytorch Documentation》 Pytorch官方手册 (入门推荐!)
- 《计算机视觉》 计算机视觉方面的基础知识
结合视频一起学习更佳,同时加强pytorch实战
4. 规划
- 《PLANNING ALGORITHMS》 规划算法介绍,英文版
- 《Robotics Modelling, Planning and Control》 机器人经典教程
- 《Modern Robotics》 机器人规划控制
- 《Trajectory Planning for Automatic Machines and Robots》 轨迹规划
- 《强化学习》 强化学习基础理论的经典著作。未来planning的方向之一
5. 控制
- 《Feedback Control of Dynamic Systems》 控制理论经典教材
- 《PID controllers: Theory, design and tuning》、《Advanced PID Control》 PID控制经典书籍
- 《自动控制原理》 胡寿松版,国内经典自动控制教材。
6. 车联网
- 车联网白皮书(C-V2X白皮书)
- 车联网白皮书(2018年)
- 车联网网络安全白皮书(2017年)
- 车联网白皮书(2017年)
- C-V2X业务需求演进
- 车辆高精度定位白皮书
- C-V2X产业化路径和时间表研究白皮书
- LTE-V2X安全技术白皮书
- MEC与C-V2X融合 应用场景
- C-V2X白皮书
主要介绍了V2X的架构演进和一些产业研究,对CV2X的技术方案了解非常有帮忙。
自动驾驶技术栈
这里主要对自动驾驶技术做了硬件和软件2个大类的划分,图片如果不清晰可以查看思维导图原图链接


开源项目
开源项目也是学习的重要方面
1.全栈
2. 仿真
3. 中间件
- ROS - 机器人操作系统 (ROS) 是一组软件库和工具,可帮助您构建机器人应用程序。
- Cyber - Baidu Apollo使用的中间件。
- Autosar - 汽车开放系统架构(闭源收费),一系列汽车软件框架,软件厂家可以根据自己的要求开发或定制。
数据集
1. 驾驶数据集
- KITTI 目前最知名的自动驾驶数据集之一,一些创业公司都会拿里面的数据进行排名比赛。
- Cityscapes 目标是理解街景的语义,主要是针对城市街景做语义解析。
- Mapillary 是一个由位于瑞典马尔默的Mapillary AB开发,用来分享含有地理标记照片的服务。其创建者想要利用众包的方式来把整个世界(不仅是街道)以照片的形式存储。
- comma.ai's Driving Dataset 目的是低成本的自动驾驶方案,目前是通过手机改装来做自动驾驶,开源的数据主要是行车记录仪的数据。
- Udacity's Driving Dataset 优达学城的自动驾驶数据集,优达学城真的是业界良心,希望国内也多点靠谱的网课。
- Washington DC's Lidar Data 看起来像是亚马逊的数据?
- Apolloscape 百度的自动驾驶数据集,有很多复杂场景的道路,同意用数据要同意很长一段声明。
- BDDV Berkeley的大规模自动驾驶视频数据集。
- Oxford RobotCar 对牛津的一部分连续的道路进行了上百次数据采集,收集到了多种天气、行人和交通情况下的数据,也有建筑和道路施工时的数据。1000小时以上。
- nuscenes aptiv提供的数据集,带标注,宣称是目前最大的数据集之一,资源在Amazon S3,目前被墙,后面看是否做个镜像。
- Waymo open dataset waymo在CVPR2020上提供的自动驾驶数据集,数据量和场景都非常完整。
2. 交通标志数据集
- KUL Belgium Traffic Sign Dataset 比利时的一个交通标志数据集。
- German Traffic Sign 德国交通标注数据集 。
- STSD 超过20 000张带有20%标签的图像,包含3488个交通标志。
- LISA 超过6610帧上的7855条标注。
- Tsinghua-Tencent 100K 腾讯和清华合作的数据集,100000张图片,包含30000个交通标志实例。
论文
1. 论文下载
论文下载强烈推荐sci-hub,感谢这个网站的作者。
2. 自动驾驶综述
- Self-Driving Cars: A Survey
- Towards Fully Autonomous Driving: Systems and Algorithms
- A Survey of Autonomous Driving: Common Practices and Emerging Technologies
- A Survey of Deep Learning Techniques for Autonomous Driving
3. 定位
下面总结了目前主流的定位方法,以及其优缺点,参考"A Survey of Autonomous Driving: Common Practices and Emerging Technologies"需要的自取
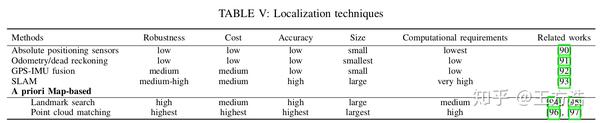

1.state-of-art定位综述
A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications
2. SLAM方法在自动驾驶领域应用综述
- Simultaneous localization and mapping: A survey of current trends in autonomous driving
- Past, Present, and Future of Simultaneous Localization And Mapping: Towards the Robust-Perception Age - 2016
- A critique of current developments in simultaneous localization and mapping - 2016
3.斯坦福DARPA比赛开山之作,主要是关于SLAM方法
Map-Based Precision Vehicle Localization in Urban Environments Robust Vehicle Localization in Urban Environments Using Probabilistic Maps
4.百度GNSS和点云定位融合方案
Robust and Precise Vehicle Localization based on Multi-sensor Fusion in Diverse City Scenes
4. 感知
- 计算机视觉在自动驾驶应用综述
- Computer Vision for Autonomous Vehicles:Problems, Datasets and State-of-the-Art
- Deep Multi-modal Object Detection and Semantic Segmentation for Autonomous Driving: Datasets, Methods, and Challenges [link] - 博世对数据集、识别、分割的整理
2. 物体识别综述
- Object Detection With Deep Learning: A Review
- 50 Years of object recognition: Directions forward
- Deep Learning for Generic Object Detection: A Survey
- Object Detection in 20 Years: A Survey - 2019
3. 3D目标识别
- 3D Object Detection for Autonomous Driving: A Survey - 2021
4. 道路和车道识别
Recent progress in road and lane detection: a survey
5. 传感器融合
- Multisensor data fusion: A review of the state-of-the-art
- A Review of Data Fusion Techniques
- A COMPREHENSIVE REVIEW OF THE MULTI-SENSOR DATA FUSION ARCHITECTURES
- A Survey of Multisensor Fusion Techniques, Architectures and Methodologies
6. 多目标跟踪
- SIMPLE ONLINE AND REALTIME TRACKING
- SIMPLE ONLINE AND REALTIME TRACKING WITH A DEEP ASSOCIATION METRIC
- Deep Learning-based Vehicle Behaviour Prediction For Autonomous Driving Applications: A Review
- Multiple Object Tracking: A Literature Review
- DEEP LEARNING IN VIDEO MULTI-OBJECT TRACKING: A SURVEY
- Deep Learning for Visual Tracking: A Comprehensive Survey
- Learning to Divide and Conquer for Online Multi-Target Tracking
- An Experimental Survey on Correlation Filter-based Tracking
5.预测
- A Review of Tracking, Prediction and Decision Making Methods for Autonomous Driving
- Human Motion Trajectory Prediction: A Survey
- Deep Learning-based Vehicle Behaviour Prediction For Autonomous Driving Applications: A Review
- A survey on motion prediction and risk assessment for intelligent vehicles
6. 规划控制
- 综述论文
- A Survey of Motion Planning and ControlTechniques for Self-driving Urban Vehicles
- A Review of Motion Planning Techniques for Automated Vehicles
2. 百度EMplanner论文
Baidu Apollo EM Motion Planner
7. End-to-End
端到端自动驾驶
End to End Learning for Self-Driving Cars - 2016 NVIDIA
8.V2X
- v2x测试综述
A Survey of Vehicle to Everything (V2X) Testing
9. DARPA
DARPA城市挑战赛是无人驾驶技术的鼻祖,下面是参赛的队伍发表的论文集
- Autonomous Driving in Urban Environments:Boss and the Urban Challenge
- Motion Planning in Urban Environments
- Junior: Stanford in The Urban Challenge
- Odin: Team VictorTango’s entry in the DUC
- A Perception-Driven Autonomous Urban Vehicle
- Little Ben: The Ben Franklin Racing Team’s Entry in the 2007 DARPA Urban Challenge
- Team Cornell’s Skynet: Robust Perception and Planning in anUrban Environment
- A Practical Approach to Robotic Design for the DARPA Urban Challenge
- Team AnnieWAY’s Autonomous System for the DARPA Urban Challenge 2007
- Driving with Tentacles: Integral Structures for Sensingand Motion
- Caroline: An Autonomously Driving Vehicle for Urban Environments
- The MIT–Cornell Collision and Why It Happened
- A Perspective on Emerging Automotive Safety Applications,Derived from Lessons Learned through Participation in the DARPA Grand Challenges
- TerraMax: Team Oshkosh Urban Robot
博客
1.资料合集
2. 自动驾驶操作系统
3. Apollo学习系列
- apollo介绍(一)
- apollo介绍之map模块(二)
- apollo介绍之localization模块(三)
- apollo介绍之planning模块(四)
- apollo介绍之Routing模块(六)
- apollo介绍之Transform模块(七)
- apollo介绍之Canbus模块(八)
- apollo介绍之Control模块(九)
- apollo介绍之Perception模块(十七)
- apollo介绍之Audio模块(十八)
- apollo预测模块分享(二十一)
- apollo汽车底盘适配(二十六)
4. 设备驱动
5.Cyber框架
- apollo介绍之cyber设计(五)
- apollo介绍之Cyber框架(十)
- apollo介绍之Cyber框架(十一)
- apollo介绍之Cyber定时器(十二)
- apollo介绍之Cyber Component(十三)
- apollo介绍之Cyber Data(十四)
- apollo介绍之Cyber Scheduler调度(十五)
- apollo介绍之Cyber Async异步调用(十六)
- apollo介绍之cyber启动(十九)
- apollo介绍之cyber网络IO(三十一)
- Cyber python版本
6. Apollo 工具介绍
- Apollo 工具安装(python工具托管)
- Apollo 工具adataset介绍(数据集转record包)
- Apollo 工具amodel介绍(模型管理)
- Apollo 工具amodel介绍(模型meta)
- Apollo车辆底盘适配工具adbctool
7. 高精度地图
- apollo介绍之map模块(二)
- 高精度地图制作
- 高精度地图制作(二)
- 高精度地图制作(三)
- apollo简易制图过程(二十)
- apollo高精度地图可视化(二十二)
- apollo高精度地图制作(二十三)
- apollo高精度地图标注(二十四)
8. 数据集
9. SLAM
10. 传感器标定
11. 深度学习
12. ROS
ROS Bag分析
- rosbag record代码分析
- rosbag play代码分析
- rosbag_storage总体介绍(一)
- rosbag_storage bag实现(二)
- rosbag_storage 查询bag包(三)
- rosbag_storage 文件读写(四)
- Rosbag格式分析
- Rosbag转Apollo数据包
- 一张图对比Rosbag和cyber record
- cyber record包解析工具
ROS 发布订阅模式
ROS导航模块
资料分享
1.车联网白皮书
中国信通院白皮书打包下载
如果觉得本文对你有帮助,欢迎点赞、分享、关注3连 O(∩_∩)O~~


