无刷直流电机控制简述
多功能无刷直流电机控制器:该项目是以STM32单片机为控制器,利用其丰富的外设,完成与串口显示屏的通信和对无刷直流电机的控制。该控制器支持无刷直流电机的速度控制、点动控制、定时控制、位置控制、闭环控制等功能,同时支持模拟信号、数字信号、RS-485、2.4G无线、蓝牙等多种外部信号源作为控制信号,具有限位设置、堵转保护、电流检测保护、故障报警等保护措施,加上采用串口屏人机交互界面,设计使用价值不大、但是有助于学习。
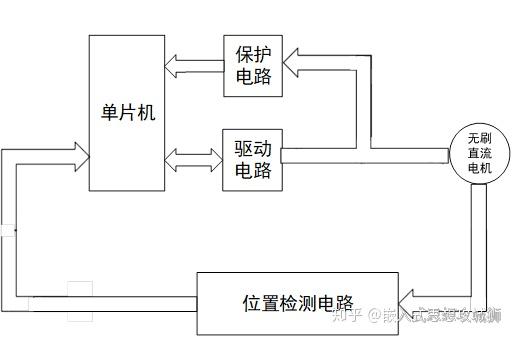
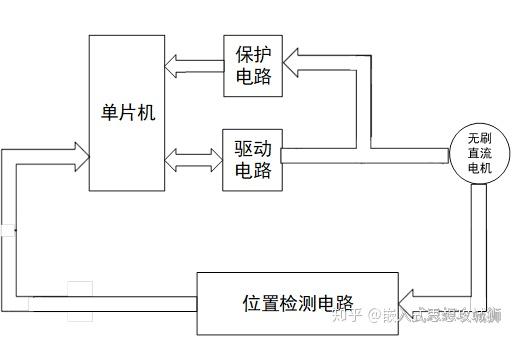
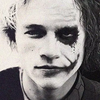
电源模块是由多个电源模块级联而成的,提供了3路不同电压,给不同的模块供电。对于驱动模块,采用专用的驱动功率芯片IR2136构成了三相全桥逆变电路,输出3路PWM波来控制电机,同时,驱动模块集成了霍尔传感器,它输出的3个霍尔信号可以确定电机转动的位置。除了HMDI串口屏,而且留有外部接口支持多种外部信号的控制方式。
- 电机转速控制,在电机的转速控制界面,通过滑动滑块和加减按钮,改变驱动电压脉冲的占空比来调整速度,同时可以通过按钮控制正反转和起停。
- 定时监控,在控制界面上通过设置定时周期时间和次数,单片机内的定时器通过定时计数,可使电机按照屏幕是上指定的周期时间次数进行相应的正传反转操作。
- PID闭环控制,当电机加上负载时,将会导致电机转速降低,所以为了保证电机以稳定转速运行,我们在速度控制的基础上加入PID闭环控制。主要包括两个部分:速度回馈和转速控制。本控制器通过个读取无刷直流电机中霍尔元件的返回值(即电平)计速来获得电机的实时转速,再计算实际转速与预期值的偏差,通过增量式PID算法,使得电机能够快速达到设定速度值以实现对转速的精确控制。
电机背景知识预备篇:
1、无刷直流电机与有刷直流电机
有刷直流电机:电刷(换向器)是直流电机的缺点。转子是绕组线圈,磁极是定子,通电后绕组线圈在磁场中产生洛伦茨力,线圈会转动,然而线圈越多,转动越稳定且可靠性更高,当一个线圈垂直磁场时候的转矩最小,另外的线圈同样受到洛伦茨力而转动。电刷的作用也就是换向器,因为线圈转动过程中,产生的感应电流方向不断变化,所以必须通过电刷换向器的作用使其方向不变稳定工作。
无刷直流电机的主要区别就是转子是电磁铁,绕组是定子,我认为它与有刷之间是相反的。无刷直流电机的运转作用于永磁铁与电磁铁之间的相互作用力。而我理解就是转子运转过程中,外部磁铁的运转,内部线圈的磁极也发生变化,也就是转子一直追着线圈的相同磁极运动,可是始终追不上。类比毛驴头上挂着胡萝卜,毛驴(转子)一直追着胡萝卜(异性磁极线圈)却一直追不上。ABC三对线圈,所以被我们惯称为三相无刷直流电机。同时当电机运转过程中只有一个线圈励磁,另外两个线圈没有通电。也就降低了输出功率。当然我们可以将线圈的自由端链接起来,这样运转相当于两个线圈通电产生更大的转矩而提高输出效率,同时也使得输出更加平滑。当然运转的过程我们为了确定具体哪一个线圈通电,就会让我使用到传感器与专用电机控制器驱动电路。霍尔传感器确定电机位置,控制器使其工作。
2、直流电机与交流电机
主要区别在于供电类型是交流电压还是直流电压,交流电机结构简单但是原理复杂,由于交流电机的转子线圈绕组可以只需要一组。直流电机的结构复杂但是原理相对简单。
3.异步电机与同步电机
同步电机和异步电机最大的区别在于它们的转子速度与定子旋转磁场是否一致,电机的转子速度与定子旋转磁场相同,叫同步电机,反之,则叫异步电机。
另外,同步电机与异步电机的定子绕组是相同的,区别在于电机的转子结构。异步电机的转子是短路的绕组,靠电磁感应产生电流。而同步电机的转子结构相对复杂,有直流励磁绕组,因此需要外加励磁电源,通过滑环引入电流;因此同步电机的结构相对比较复杂,造价、维修费用也相对较高。
根据励磁方式不同,同步电机可以分为电励磁同步电机和永磁同步电机。
1、电励磁
它的转子做成显极式的,安装在磁极铁芯上面的磁场线圈是相互串联的,接成具有交替相反的极性,并有两根引线连接到装在轴上的两只滑环上面。
磁场线圈是由一只小型直流发电机或蓄电池来激励,在大多数同步电动机中,直流发电机是装在电动机轴上的,用以供应转子磁极线圈的励磁电流。由于这种同步电动机不能自动启动,所以在转子上还装有鼠笼式绕组而作为电动机启动之用。鼠笼绕组放在转子的周围,结构与异步电动机相似。
当在定子绕组通上三相交流电源时,电动机内就产生了一个旋转磁场,鼠笼绕组切割磁力线而产生感应电流,从而使电动机旋转起来。电动机旋转之后,其速度慢慢增高到稍低于旋转磁场的转速,此时转子磁场线圈经由直流电来激励,使转子上面形成一定的磁极,这些磁极就企图跟踪定子上的旋转磁极,这样就增加电动机转子的速率直至与旋转磁场同步旋转为止。
2、永磁
转子不励磁的同步电动机能够运用于单相电源上,也能运用于多相电源上。这种电动机中,有一种的定子绕组与分相电动机或多相电动机的定子相似,同时有一个鼠笼转子,而转子的表面切成平面。所以是属于显极转子,转子磁极是由一种磁化钢做成的,而且能够经常保持磁性。鼠笼绕组是用来产生启动转矩的,而当电动机旋转到一定的转速时,转子显极就跟住定子线圈的电流频率而达到同步。显极的极性是由定子感应出来的,因此它的数目应和定子上极数相等,当电动机转到它应有的速度时,鼠笼绕组就失去了作用,维持旋转是靠着转子与磁极跟住定子磁极,使之同步。
有刷电机与无刷电机调速方式的区别
实际上两种电机的控制都是调压,只是由于无刷直流采用了电子换向,所以要有数字控制才可以实现了,而有刷直流是通过碳刷换向的,利用可控硅等传统模拟电路都可以控制,比较简单。
1、有刷马达调速过程是调整马达供电电源电压的高低。调整后的电压电流通过整流子及电刷地转换,改变电极产生的磁场强弱,达到改变转速的目的。这一过程被称之为变压调速。
2、无刷马达调速过程是马达的供电电源的电压不变,改变电调的控制信号,通过微处理器再改变大功率MOS管的开关速率,来实现转速的改变。这一过程被称之为变频调速。
电机的启动问题(足够大的启动电流信号):
普通直流电动机的电枢在转子上,而定子产生固定不动的磁场。为了使直流电动机旋转,需要通过换向器和电刷不断改变电枢绕组中电流的方向,使两个磁场的方向始终保持相互垂直,从而产生恒定的转矩驱动电动机不断旋转。
由于电刷要不定期更换、维护,所以为了去掉电刷,无刷直流电动机将电枢放到定子上去,而转子制成永磁体,这样的结构正好和普通直流电动机相反;
然而,即使这样改变还不够,因为定子上的电枢通过直流电后,只能产生不变的磁场,电动机依然转不起来。为了使电动机转起来,必须使定子电枢各相绕组不断地换相通电,这样才能使定子磁场随着转子的位置在不断地变化,使定子磁场与转子永磁磁场始终保持左右的空间角,产生转矩推动转子旋转。
无刷直流电机的定子绕组多做成三相对称星形接法,(为什么成为三相且ABC三个绕组)。为了检测电机转子的极性,在电机内装有位置霍尔传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。
硬件电路篇:
1、霍尔传感器:霍尔效应:通电导体的横截面上下之间存在电压差,实际就是移动的电子受磁场效应产生的。(洛伦茨力左手定则):磁感线穿手心,四指指向电流。
霍尔传感器在电机内部切割磁感线变化而引起电压变化,可以通过变化相应的相位和变化的间隔时间,确定电机的转向角度,同时知道角速度,则可以实现相应的转动需求。包括角度控制、定时转动、点动控制等。
2、三相全桥驱动电路MOSFET驱动功率芯片IR2136:连接单片机与电机构成了三相全桥逆变电路,输出3路PWM波来控制电机。其实我们可以理解该芯片内部集成了H桥集成电路,每个桥路由MOS管组成,而我们把MOS看成开关,多个MOS组成的多个开关导通的顺序不同则影响电机的转动方向,此时单片机输出信号决定了电机转向控制。而这样只是把电机通过PWM波让它动起来了,并没有形成闭环控制,所以我们此时桥路+霍尔传感器才能实现真正的闭环控制。
但霍尔传感器读出电机的运转参数回传单片机,单片机再改变输出信号PWM波按照理想的运转实现目标运动控制,这就是闭环,这里的霍尔传感器作为了反馈重要节点。然而这样的闭环控制必须需要确定电机负载变化最快最理想的找到输出参数的范围实现PID闭环控制。也就需要应用PID算法。
PID算法:
在生活中,很多事情我们是需要按照经验去达到预期的结果,在完成的过程中我们需要凭借经验去改变逐步逼近理想结果目标。(例如:烧水过程的调节温度)但是工业以及实际微控制器控制过程中,我们需要利用PID算法,事先计算找出基本的比例系数,按照一定的关系在工程应用过程中不断调节达到理想控制过程。
PID控制器(PID(比例(proportion)、积分(integral)、微分(differential))控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。这个理论和应用的关键是,做出正确的测量和比较后,如何才能更好地纠正系统。

式中Kp——比例系数;Ki——积分系数;Kd——微分系数;e代表是偏差。
分部分理解:(1)比例部分:按照偏差的一定比例逐渐变化,输出值与目标值存在静差,这是因为偏差存在,才会按照偏差一定比例变化。(2)此时需要理解惯性系统(条件变化停止自身系统持续变化),积分部分对偏差的不断累加达到期望值,但是累加过程是通过先对目标采样,这样累加过程总是滞后,所以i可能超过目标值。(3)微分部分:超前遇见能力,此刻值与前一值对比,采样周期过程中对于变化差值逐渐减少趋于稳定,类比阻尼力。所以PID整个过程的变化应该类比下图演示:
在无刷电机PID闭环控制过程中,主要有以下几个校正环节:a.比例环节:是指当系统出现偏差时,比例环节就能立刻产生作用,去减小偏差。比例系数越大,调节速度就越快。过大的比例作用,会导致系统的稳定性下降,对系统产生不利的影响。b.积分环节:为了消除稳态误差,要进行积分调节。引入了积分调节会使系统的稳定性下降,而且导致动态响应变慢。为此积分环节常以组合形式出现,即PI或者PID控制。c.微分环节:可以反映系统偏差的变化率,具有一定的预见性,可以预见偏差的变化趋势。但是它的引入容易引起震荡,所以它一般也是以组合的形式出现,即PD或者PID控制。
PID参数整定
通过对工程整定方法的研究,在此重点介绍试凑法,它的具体操作过程如下:
- 先调节比例
根据实际情况,把参数由小到大进行设置,然后观察它的响应,直至出现反应快、超调小的响应曲线,但是此时系统是存在误差的,如果此时的误差,系统可以容忍,那么参数就可以确定了。
- 再调节积分
如果在比例控制时出现的稳态误差系统不能容忍,这时就需要在比例控制的基础上添加积分控制,首先给积分时间不设置一个很大值,然后将前面所得到的参数适当的缩小,然后在去减小不,最后参看系统的响应曲线,直到系统的稳态误差消除,这时就得到了所需要的和工参数。
- 最后调节微分
经过前面两个调节,系统消除了稳态误差,但是系统的动态性能受到了影响,此时就需要加入微分调节,构成控制器。在调整的过程中,先把几设置为零,然后再慢慢的增大兀,与此同时要相应的改变和不,慢慢的试凑去得到满意的控制参数。
备注:部分理解来源与珂学原理。