
集成混合运动与大功率柔性操作的半人马救灾机器人(1)——机电系统平台介绍

作者在博士生期间参与了欧盟CENTAURO项目(Horizion 2020, No. 644839),该项目于2018年11月结束。作者将会根据如下两篇paper来大致介绍我们在这个项目中取得的一些成果,同时也会分享目前存在的问题和所面临的挑战,希望能够大家提供一些有益的借鉴。
1. T. Klamt, D. Rodriguez, L. Baccelliere, et.al., F. Porcini, Z.Ren, F. Schilling, et.al., N. G. Tsagarakis, and S. Behnke, "Flexbile Disaster Response of Tomorrow, Final Presentation and Evaluation of the CENTAURO System", IEEE Robotics and Automation Magazine (RAM), 2019.
2. N. Kashiri, L. Baccelliere, L. Muratore, A. Laurenzi, Z. Ren, E. Mingo Hoffman, G. Rigano, M. Kamedula, J. Malzahn, S. Cordasco, P. Guria, A. Margan, and N. G. Tsagarakis, "CENTAURO: A Hybrid Locomotion and High Power Resilient Manipulation Platform", IEEE Robotics and Automation Letters (RAL), 2019.
此文是整个系列文章的第一篇,即关于CENTAURO机器人的硬件平台搭建的。
在开始具体的介绍之前,分享如下的视频让大家大致了解项目的背景和初期成果(视频成果截至17年底,18年后续有相应硬件的改变,诸如左手末端执行器及相应电子设备的更换):
 H2020 CENTAUROhttps://www.zhihu.com/video/1121495623878336512
H2020 CENTAUROhttps://www.zhihu.com/video/1121495623878336512

CENTAURO“半人马式”的设计动机
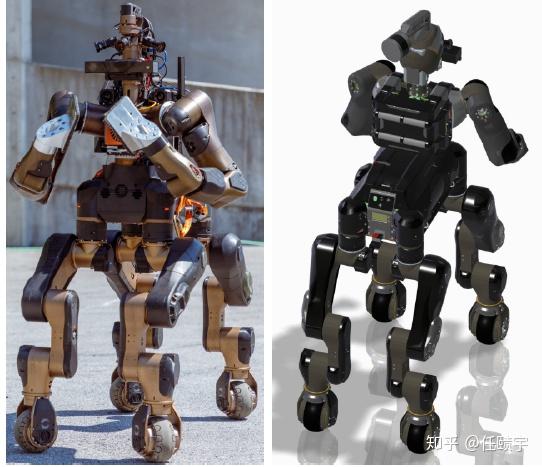
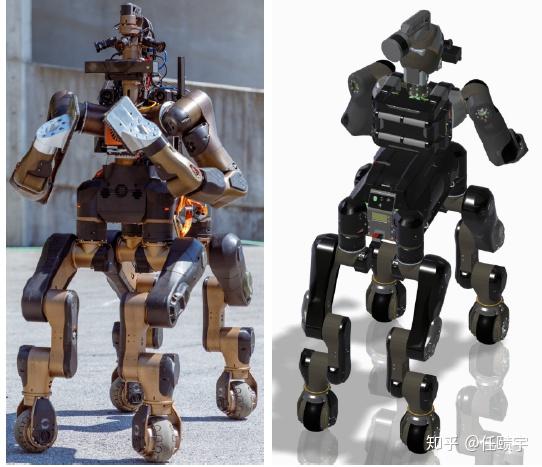
CENTAURO机器人采用了下身【四足腿轮混合】+上身【仿人形双臂】的设计理念,如图1——这实际上是在现有的技术条件下找到一个最具有效率的、针对实际任务的解决方案,但并不能说是在未来的一个最优解。
对于下身【四足腿轮混合】的设计,我们的考虑主要是源于2015年Darpa Robotics Challenge(DRC)的决赛:
1. 腿足式机器人对于立体空间的适应性要优于轮式(诸如在DRC比赛中,机器人需要完成上下车辆的运动);
2. 四足机器人的移动稳定性要优于双足,且能耗、成本等要优于六(多)足;
3. 腿轮的混合设计对比单纯的腿足有着极大的移动效率(DRC的前几名均采用腿轮式)。
而对于上身【仿人形双臂】的设计,我们的考虑如下:
1. 扩大机器人的末端操作空间(双臂皆为7轴);
2. 丰富机器人的末端操作能力,尤其是双臂协同操作(Dual-Arm Manipulation),在很多实际的救灾操作任务中,单臂是难以完成的(后续的文章会有相关Demo);
3. 帮助操作人员在陌生环境中更好地理解机械臂操作的运动学限制——CENTAURO项目上层的AI是基于驾驶员,驾驶员需穿戴外骨骼进行遥操作,因采用仿人的7轴机械臂设计,做到和人类手臂的运动学尽可能地近似。
CENTAURO的整体硬件配置
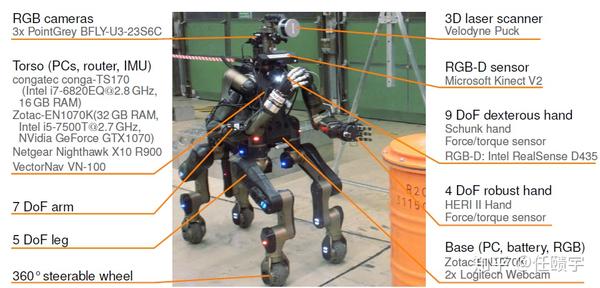
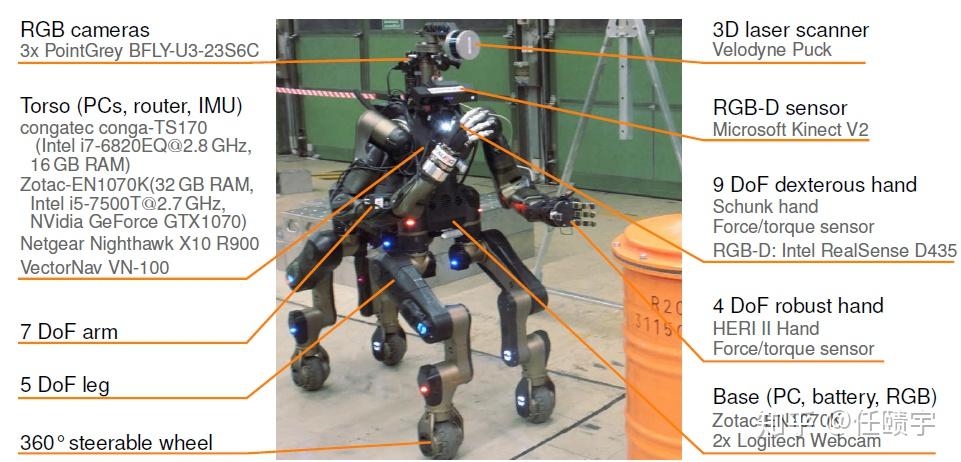
关于CENTAURO机器人整体的硬件配置,可以事先参考图2做一个预览。一些大致解读如下:
- 多圈式的全向轮设计
在切换至行走步态时能够提供峰值28 Nm和最大持续9 Nm的自锁扭矩,最大转速在194.8 rpm(20.4 rad/s),外圈采用的弹性材料是UPX8400(60 A Shore);
- 基于两款不同机械手的末端执行器
右手是商业化偏向全驱动方案的雄克灵巧手,左手是基于欠驱动方案的 HERI II Hand^{[1]} ,整体考虑是针对灵巧、低负载的操作采用雄克灵巧手,而针对高负载、高冲击的操作采用欠驱动的HERI II Hand。同时两只手在和机械臂相连接时,都集成6维力矩传感器,在右手上还集成了额外的RGB-D相机(在机械臂末端操作的很多情况下,存在大量头部相机的视野死角);
- 传感器的硬件配置
为了更好的感知外界环境与机器人本身的运动姿态,在机器人的头部集成了3D激光雷达(Velodyne Puck)、RGB-D相机(Kinect V2)与RGB相机(PointGrey BFLY, QTY: 3)。为了确保更加广阔的视野空间,3D激光雷达和深度相机的基座本身具有主动控制的自由度,详细可见图3。同时为了规避视觉死角,除了上一点提到的右手手臂的RGB-D相机,机器人躯干底部还安装了2台RGB相机以获取机器人足部的视觉信息。


除了视觉感知以外,机器人躯干上还集成了来自VectorNav VN-100的IMU,且每个关节驱动器有一维的扭矩反馈信息,四肢末端均集成了6维力/力矩传感器。
- 电池和WIFI模块
CENTAURO项目要求机器人能够不带任何电缆进入特定场景。机器人所携带的电池来自AMICELL公司,没有子型号,为定制电池,其相关参数如下:
电池容量:34.6 Ah,额定电压:48 V,最大电流:80 A,电池重量:7.5 kg,正常能够支持机器人工作约2小时(项目实测)。
WIFI模块是采用的Netgear Nightawx X10 R9000,这款路由器的体型和重量都摆在那里,属于工业级,高传输速度、高带宽、高处理速度且覆盖范围广,项目中实测40米左右的开阔空间几乎无通信上的延时和丢包(可能有效距离会更远,但目前没测试到)。
- 机载计算机模组/计算机
CENTAURO搭载了如下3台计算机:
1. Congatec conga-TS170(计算机模组):低层实时运动控制;
2. Zotac-EN1070K(Mini PC):处理视觉和IMU信息,相关感知;
3. Zotac-EN1070K(Mini PC):上层运动控规划。
CENTAURO的整体几何尺寸与自由度分布
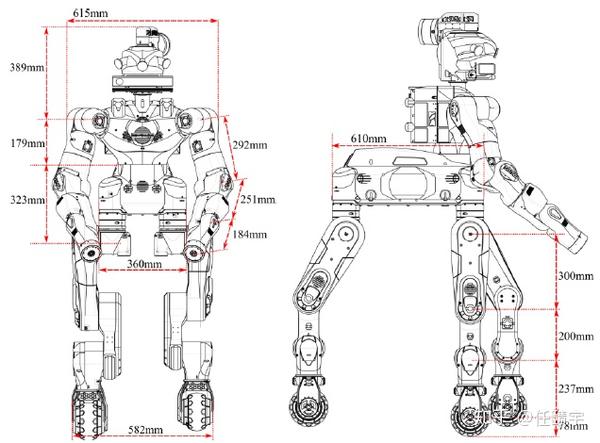
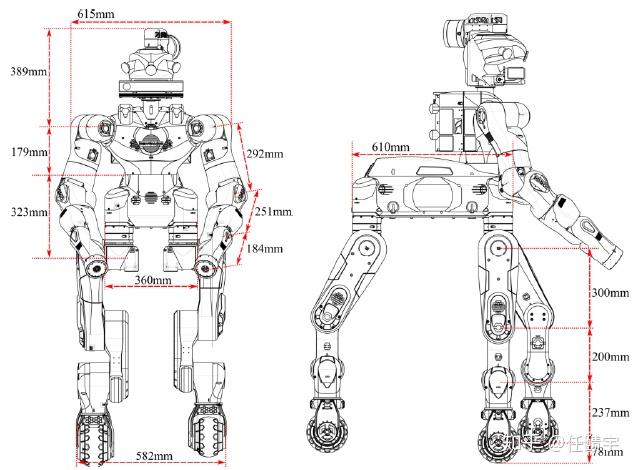
关于CENTAURO机器人机械本体上实现的几何尺寸可参考图4。
- 机身的高度在不同配置下通过高度在112-171 cm;
- 机身的最小通过宽度和长度均在61 cm;
- 机身的自重在92 kg (包括7.5 kg的电池);
- 整机的自由度数为55:单腿6自由度(x4)+ 单臂7自由度(x2)+ 上身1自由度(Yaw方向)+ 头部相机3自由度 + Schunk灵巧手9自由度 + HERI II Hand的4自由度;
- 整机的最大移动速度在1.6 m/s,主动轮直径在15.6 cm。
CENTAURO的关节驱动模块
CENTAURO机器人采用的是来自IIT TreeRobotics ^{[2]} 的模块化关节驱动模组,皆为弹性串联驱动器(SEA原理,通过弹性体的偏转测量扭矩,Encoder base方案),按照不同扭矩大小的需要,分为如下图的5个系列:


这5款驱动器按照颜色分类,从左至右为Red-Yellow-Orange-Dark Greed-Light Green,其相应的Specification如表1:


CENTAURO的整体关节(臂/腿)设计
首先在整个机器人55个自由度和采用关节模块化驱动器的基础下,各个具体的关节采用的驱动器模组类型可参见表2:

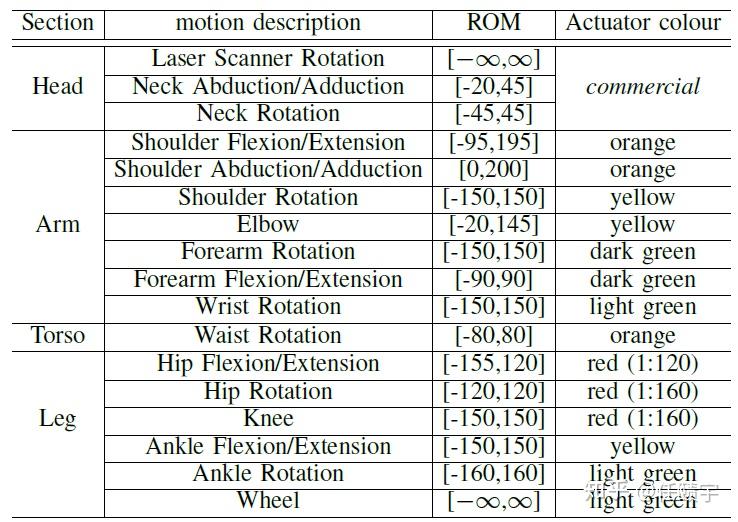
补充: 头部的商用驱动器采用的Maxon DC22X,减速比138:1
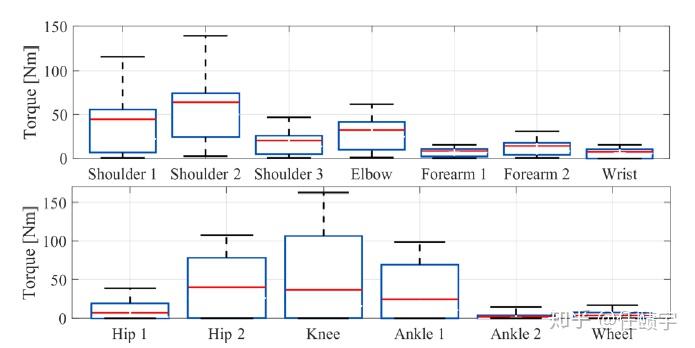
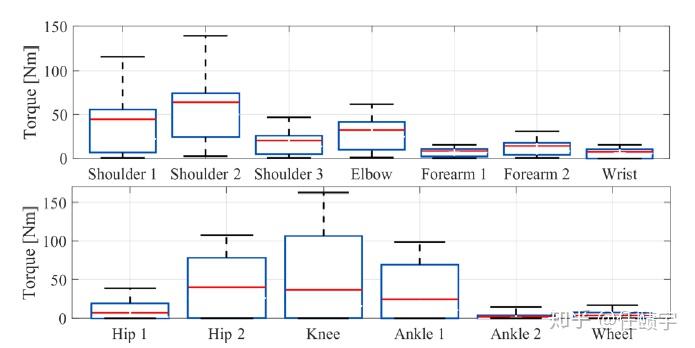
基于表2,各关节驱动器的选型主要是根据机器人进行一系列运动时所需要的输出扭矩大小(当然某些关节也要考虑结构强度而采用扭矩冗余的驱动模组),在一系列的运动仿真之后,我们得到了如下图6的扭矩分布:
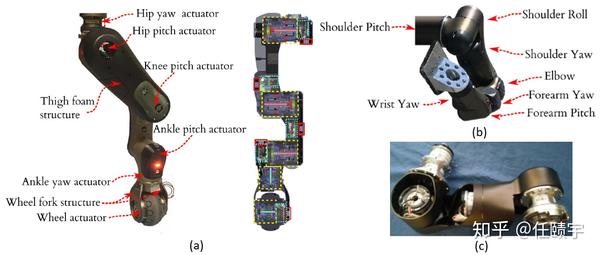
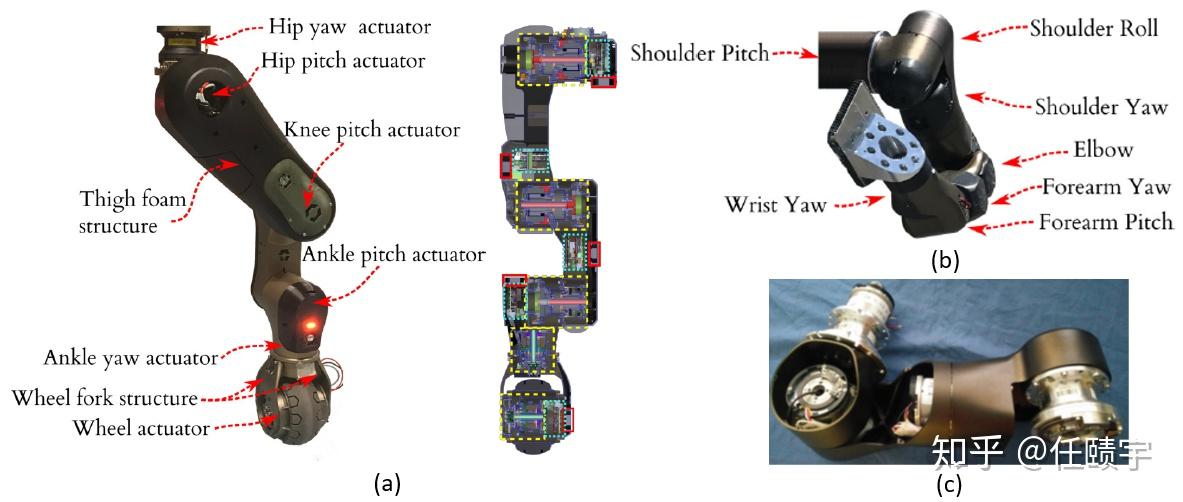
在确定各关节的具体驱动器选型后,整体关节即单腿和手臂的设计如下图7。在图7(a)中,大腿关节采用了铝合金外壳-内部缓冲泡沫填充的设计,满足轻量化设计的目标,在图7(a)右侧的截面图中,黄色区域为电机-减速箱-弹性体,蓝色区域为相应驱动电路,而红色区域为散热风扇 。图7(b)展示的为较为传统的7轴机械臂设计以及其相应的外骨骼-细胞式的Link结构设计。基于中空走线的SEA关节模组驱动器,就带来了几乎无外置电缆走线的外观良好、安全的机械臂/腿设计。
整体的硬件平台搭建的文章就写到这里,应该算是做到基本概括,如果有遗漏的后续会再补充。另外,因为整体内容较多较杂,所以不能涉及到具体的细节,同时可能文本中也会有相应的错误,大家发现也感谢及时留言给我。
最后这是CENTAURO系列的第一篇文章,后续应该会有(二)软件框架和操作中心介绍以及(三)自主运动控制器与(四)项目总结。
Reference
[1] Z. Ren, N. Kashiri, C. Zhou and N. G. Tsagarakis, "HERI II: A Robust and Flexible Robotic Hand Based on Modular Finger design and Under Actuation Principles", in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018.
[2] IIT Tree Robotics, reference link: https://treerobotics.eu/.
