
给训练踩踩油门 —— Pytorch 加速数据读取

需求
最近在训练 coco 数据集,训练集就有 11 万张,训练一个 epoch 就要将近 100 分钟,训练 100 个 epoch,就需要 7 天!这实在是太慢了。
经过观察,发现训练时 GPU 利用率不是很稳定,每训练 5 秒,利用率都要从 100% 掉到 0% 一两秒,初步判断是数据读取那块出现了瓶颈。于是经过调研和实验,制定了下列解决方案。
解决方案
(1)prefetch_generator
使用 prefetch_generator 库在后台加载下一 batch 的数据。
安装:
pip install prefetch_generator使用:
# 新建DataLoaderX类
from torch.utils.data import DataLoader
from prefetch_generator import BackgroundGenerator
class DataLoaderX(DataLoader):
def __iter__(self):
return BackgroundGenerator(super().__iter__())然后用 DataLoaderX 替换原本的 DataLoader。
提速原因:
原本 PyTorch 默认的 DataLoader 会创建一些 worker 线程来预读取新的数据,但是除非这些线程的数据全部都被清空,这些线程才会读下一批数据。
使用 prefetch_generator,我们可以保证线程不会等待,每个线程都总有至少一个数据在加载。
(2)data_prefetcher
更新:经评论区提醒,有同学在用这个技术的时候遇到显存溢出的问题,见 apex issues ,大家用的时候注意一下。
使用 data_prefetcher 新开 cuda stream 来拷贝 tensor 到 gpu。
使用:
class DataPrefetcher():
def __init__(self, loader, opt):
self.loader = iter(loader)
self.opt = opt
self.stream = torch.cuda.Stream()
# With Amp, it isn't necessary to manually convert data to half.
# if args.fp16:
# self.mean = self.mean.half()
# self.std = self.std.half()
self.preload()
def preload(self):
try:
self.batch = next(self.loader)
except StopIteration:
self.batch = None
return
with torch.cuda.stream(self.stream):
for k in self.batch:
if k != 'meta':
self.batch[k] = self.batch[k].to(device=self.opt.device, non_blocking=True)
# With Amp, it isn't necessary to manually convert data to half.
# if args.fp16:
# self.next_input = self.next_input.half()
# else:
# self.next_input = self.next_input.float()
def next(self):
torch.cuda.current_stream().wait_stream(self.stream)
batch = self.batch
self.preload()
return batch然后对训练代码做改造:
# ----改造前----
for iter_id, batch in enumerate(data_loader):
if iter_id >= num_iters:
break
for k in batch:
if k != 'meta':
batch[k] = batch[k].to(device=opt.device, non_blocking=True)
run_step()
# ----改造后----
prefetcher = DataPrefetcher(data_loader, opt)
batch = prefetcher.next()
iter_id = 0
while batch is not None:
iter_id += 1
if iter_id >= num_iters:
break
run_step()
batch = prefetcher.next()提速原因:
默认情况下,PyTorch 将所有涉及到 GPU 的操作(比如内核操作,cpu->gpu,gpu->cpu)都排入同一个 stream(default stream)中,并对同一个流的操作序列化,它们永远不会并行。要想并行,两个操作必须位于不同的 stream 中。
而前向传播位于 default stream 中,因此,要想将下一个 batch 数据的预读取(涉及 cpu->gpu)与当前 batch 的前向传播并行处理,就必须:
(1) cpu 上的数据 batch 必须 pinned;
(2)预读取操作必须在另一个 stream 上进行
上面的 data_prefetcher 类满足这两个要求。注意 dataloader 必须设置 pin_memory=True 来满足第一个条件。
(3)把内存当硬盘
把数据放内存里,降低 io 延迟。
使用:
sudo mount tmpfs /path/to/your/data -t tmpfs -o size=30G然后把数据放挂载的目录下,即可。
size指定的是 tmpfs 动态大小的上限,实际大小根据实际使用情况而定;- 数据不一定放在物理内存中,系统根据情况,有可能放在
swap的页面,swap一般是在系统盘; - 重启或者断电后数据全部清空。
如果想系统启动时自动挂载,可以编辑 /etc/fstab,在最后添加如下内容:
mount tmpfs in /tmp/
tmpfs /tmp tmpfs size=30G 0 0(4)设置num_worker
DataLoader 的 num_worker 如果设置太小,则不能充分利用多线程提速,如果设置太大,会造成线程阻塞,或者撑爆内存,反而导致训练变慢甚至程序崩溃。
他的大小和具体的硬件和软件都有关系,所以没有一个统一的标准,可以通过一些简单的实验来确定。
我的经验是设置成 cpu 的核心数或者 gpu 的数量比较合适。
(5)优化数据预处理
主要有两个方面:
- 尽量简化预处理的操作,使用 numpy、opencv 等优化过的库,多多利用向量化代码,提升代码运行效率;
- 尽量缩减数据大小,不要传输无用信息。
(6)其他
- 使用
TFRecord或者LMDB等,减少小文件的读写; - 使用
apex.DistributedDataParallel替代torch.DataParallel,使用apex进行加速; - 使用
dali库,在 gpu 上直接进行数据预处理。
实验
分别用不同的提速方法做实验,来定量地分析提速的效果。为了快速实验,采用了 5000 张的小批量训练集,确保一次 epoch 的训练时间很短。
实验一:
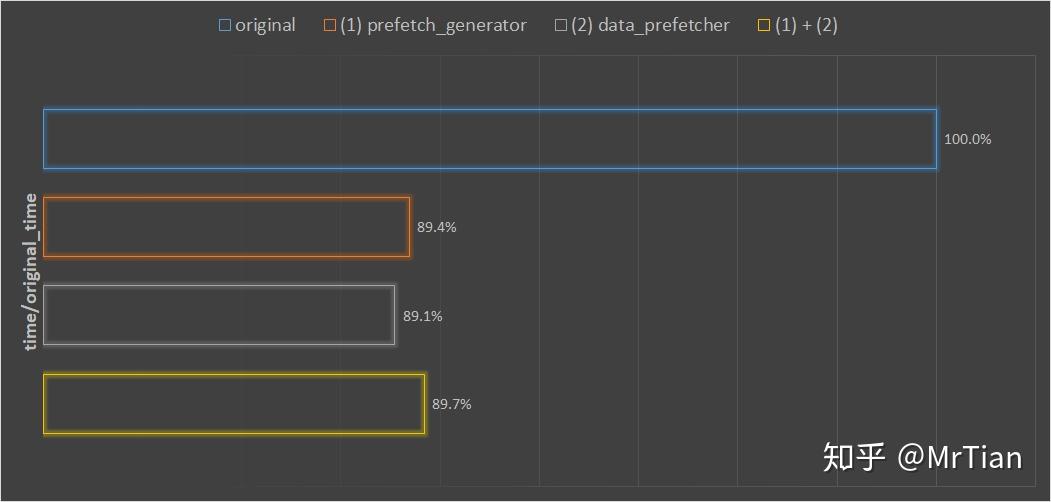
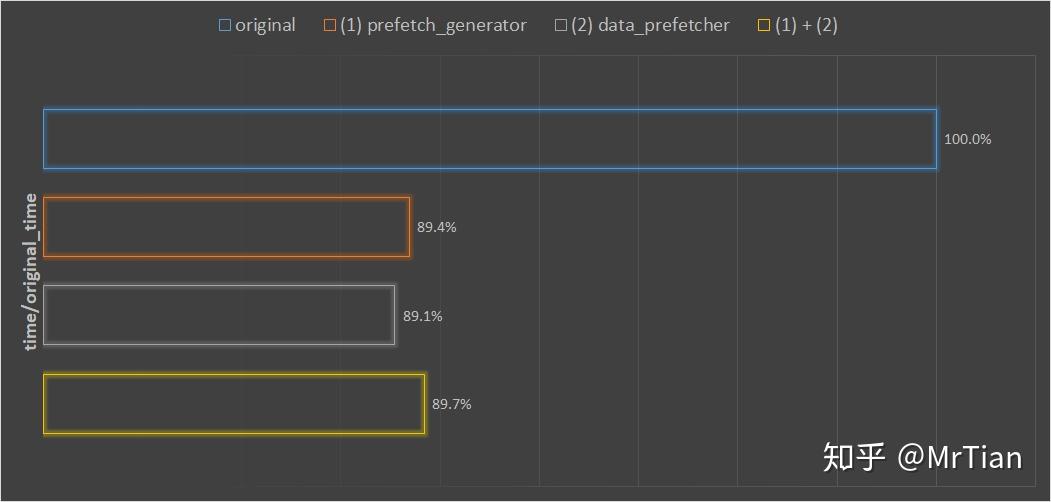
在 hdd 硬盘上,用同样的参数、同样的数据,分别用不同的优化方法,训练两个 epoch,记录训练的时间。
优化方法分别是:
original:默认 dataloader,不优化(1)prefetcher_generator:只用 prefetcher_generator 库优化(2)data_prefetcher:只用 data_prefetcher 优化(1)+(2):同时用prefetcher_generator和data_prefetcher优化
最后将得到的时间,除以不优化时的训练时间。
从图中可以观察到:
- (1) 和 (2) 两种优化方法都差不多有 10% 左右的训练时间的缩短;
- (1) (2) 同时使用,并没有进一步缩短训练时间,反而不如只使用一种优化方法。
实验二:
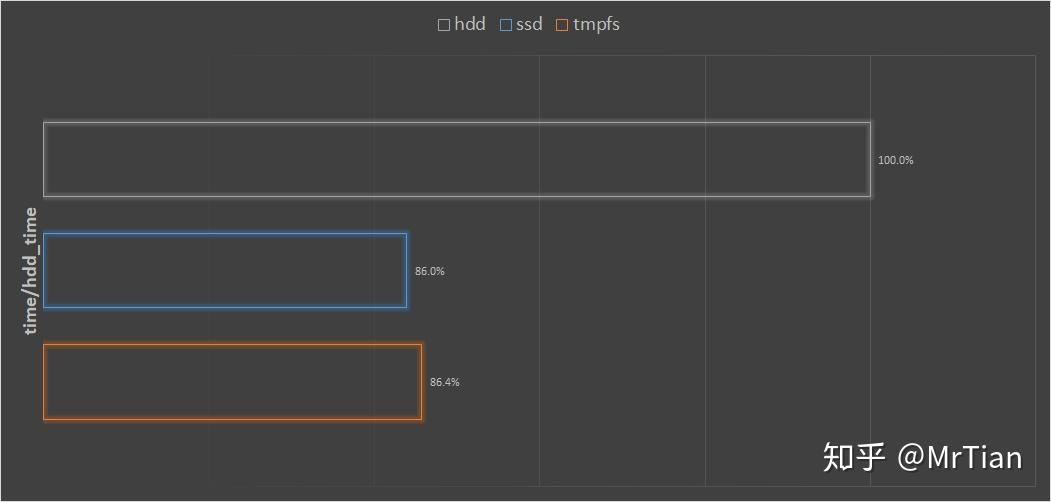

用同样的参数、同样的数据,用默认的 dataloader,数据分别在 hdd、ssd 和 tmpfs 内存上进行训练两个 epoch,记录训练时间。
最后时间统一除以在 hdd 上的训练时间。
从图中可以观察到:
- 将数据从 hdd 挪到 ssd 或者内存上,训练时间都有 14% 左右的缩短;
- 在 tmpfs 上训练并不比在 ssd 上快,可能的原因是数据太大,训练时并没有放在物理内存上,而是放在
swap上,而这台机器swap也是在ssd上,所以速度差不多。
实验三:
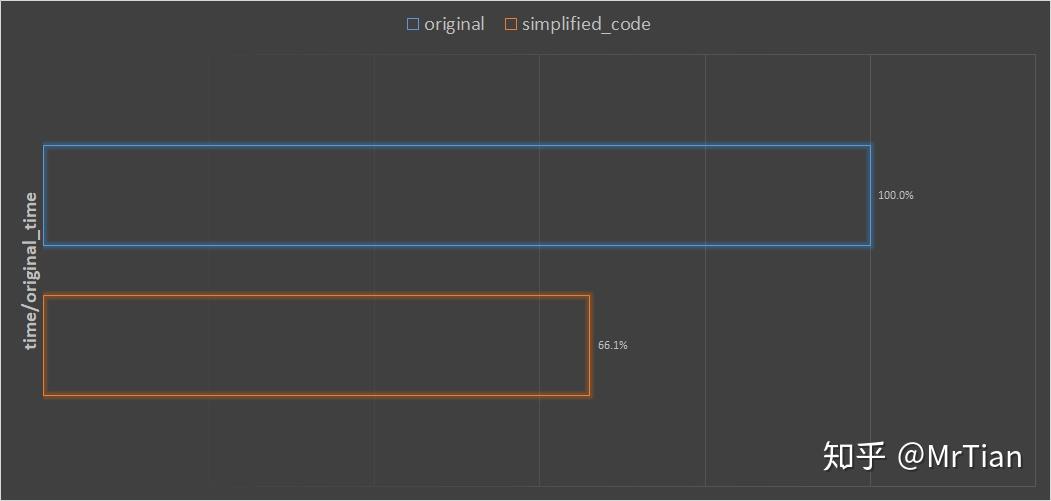

优化数据预处理代码,尽量用向量化代码,缩减数据传输大小,分别在 hdd 上,用默认 dataloader 训练。
如图,训练时间缩短了接近 34%!可见,在之前的代码中,主要是预处理部分拖慢了整体的训练速度。
总结
以上定量地分析了各加速方法的效果,当然如果各方法都用上,最后的加速比例不是简单叠加的。
最后,我将数据放在 ssd 上、用了 (1) 或者 (2) 的优化方法、优化了数据预处理代码后,最后使得训练时间缩短了 39%!也就是说,如果原来训练一个模型需要 7 天,现在需要 4 天半,节省了 2 天半的时间。
所谓磨刀不误砍柴工,建议大家在正式训练前,花一点时间排查一下训练的瓶颈,尽量提升训练的速度,这是一劳永逸的,将在后面节省大量的时间,是非常值得的。
