几何 | 计算几何基础--半平面求交

作者:henu_wxj
链接:https://blog.nowcoder.net/n/3f18ba17f8734a7c962ab1eb557a1c05
来源:牛客网
半平面,平面的一半。半平面求交,就是求得n个半平面的相交的平面。
一开始可能不太好理解。举个例子:
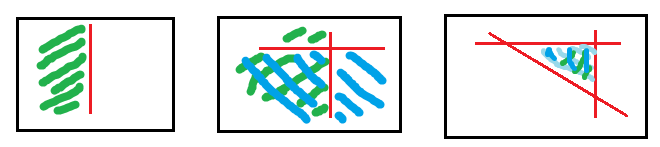

一条线,有两个半平面 两条线,四个半平面,有一个相 三条线,7个半平面,然后有一个相交的区域,这个区域就是半平面交,及存在蓝色和绿色的区域相交的区域。
我是这样理解的。如有错误,希望路过的大佬能够指出。
在程序实现的时候,向量法是一种普遍的表示方法,一般默认向量左侧是所需要的半平面,则可以通过控制向量的方向来选择半平面。
对于求半平面的交,存在一个结论,即:n个半平面的交或者是一个开放的无穷平面,或者是一个封闭的凸多边形(上面例子很明确)。
n个半平面的交有三种基本求法:1.增量法 (O(n^2)) 。2.分治法 (O(nlog(n))) 。3.排序增量法 (O(nlog(n))) 。
简单介绍一下:其中终点介绍一下3.增量排序算法,因为法3可以说是法1的优化,法2不好扩展(个人认为)。
1.增量法:假设已经得到前(n-1)个半平面的交,对于第n个平面,只需用它来“切割”前n-1个半平面交出的多边形。“切割”的过程需要遍历整个多边形,时间复杂度为 O(n) ,则算法的总时间复杂度是 (O(n^2)) 。
2.分治法:将n个半平面分成两部分,分别求完交后再将两部分的交合并求交集。整个算法的效率依赖于能够高效地求取两个凸多边形的。利用凸多边形的交可以在 O(n) 时间内求取的技术,这个算法的时间复杂度为 O(nlog(n)) 。
3.排序增量法:算法类似求取凸包的Graham-Scan算法。先将所有半平面交,按照半平面边界直线与x正半轴的夹角排序,然后扫描所有的半平面。在扫描的过程中使用一个双端队列维护半平面交。排序的复杂度为 O(nlog(n)) ,扫描的过程为 O(n) 。排序部分为该算法的瓶颈。
排序增量法求半平面交--算法步骤:
Step 1:将所有的半平面按照极角排序,排序过程还要将平行的半平面去重。
Step 2:使用一个双端队列deque,加入极角最小的半平面。
Step 3:扫描过程每次考虑一个新的半平面:
A:while deque顶端两个半平面的交点在当前半平面外:删除deque顶端的半平面。
B:while deque底部两个半平面的交点在当前半平面外:删除deque底部的半平面。
C:将当前半平面加入deque顶端。
Step 4:删除deque两端延伸出的对于半平面:
A:while deque顶端两个半平面的交点在底部半平面外:删除deque顶端的半平面。
B:while deque底部两个半平面的交点在顶部半平面外:删除deque底部的半平面。
Step 5:按顺序求取deque中下那个林半平面的交点,得到n个半平面交出的凸多边形。
实现代码:
struct Point{//点的表示
double x,y;
Point(double _x=0,double _y=0){
x=_x;y=_y;
}
friend Point operator + (const Point &a,const Point &b){
return Point(a.x+b.x,a.y+b.y);
}
friend Point operator - (const Point &a,const Point &b){
return Point(a.x-b.x,a.y-b.y);
}
friend Point operator == (const Point &a,const Point &b){
return fabs(a.x-b.x)<EPS&&fabs(a.y-b.y)<EPS;
}
}convex[MAXN];
struct V{//向量的表示
Point start,end;
double ang;//角度,[-180,180]
V(Point _start=Point(0,0),Point _end=Point(0,0),double _ang=0){
start=_start;end=_end;ang=_ang;
}
friend V operator + (const V &a,const V &b){
return V(a.start+b.start,a.end+b.end);
}
friend V operator - (const V &a,const V &b){
return V(a.start-b.start,a.end-b.end);
}
}l[MAXN],st[MAXN];
struct Triangle{
Point A,B,C;
};
int n,ccnt;
double DotMul(V a,V b){//点积
a.end=a.end-a.start;b.end=b.end-b.start;
return a.end.x*b.end.x+a.end.y*b.end.y;
}
double CroMul(V a,V b){//叉积 a×b
a.end=a.end-a.start;b.end=b.end-b.start;
return a.end.x*b.end.y-b.end.x*a.end.y;
}
int IsLineInter(V l1,V l2){//相交
if(max(l1.start.x,l1.end.x)>=min(l2.start.x,l2.end.x)&&
max(l2.start.x,l2.end.x)>=min(l1.start.x,l1.end.x)&&
max(l1.start.y,l1.end.y)>=min(l2.start.y,l2.end.y)&&
max(l2.start.y,l2.end.y)>=min(l1.start.y,l1.end.y)){
if(CroMul(l2,V(l2.start,l1.start))*CroMul(l2,V(l2.start,l1.end))<=0&&
CroMul(l1,V(l1.start,l2.start))*CroMul(l1,V(l1.start,l2.end))<=0){
return 1;
}
}return 0;
}
Point LineInterDot(V l1,V l2){//交点
Point p;
double S1=CroMul(V(l1.start,l2.end),V(l1.start,l2.start));
double S2=CroMul(V(l1.end,l2.start),V(l1.end,l2.end));
p.x=(l1.start.x*S2+l1.end.x*S1)/(S1+S2);
p.y=(l1.start.y*S2+l1.end.y*S1)/(S1+S2);
return p;
}
int JudgeOut(const V &x,const Point &p){//点在线的左侧
return CroMul(V(x.start,p),x)>EPS;//点在左侧返回0,右侧返回1
}
int Parellel(const V &x,const V &y){//平行
return fabs(CroMul(x,y))<EPS;
}
int Cmp(V a,V b){
if(fabs(a.ang-b.ang)<EPS){//角度相同时,不同的边在不同的位置
//此时有两种return方式,
//return CorMul(a,V(b.end-a.start))>=0;
//左边的边在后面的位置,这样的话,进行计算的时候就可以忽略 相同角度边的影响了
return CroMul(V(b.end-a.start),V(a.end-b.start))>EPS;
//左边的边在前面的位置,要进行进行去重判断 。
}
return a.ang<b.ang;
}
double HplaneIntersection(){
int top=1,bot=0;
sort(l,l+n,Cmp);
int tmp=1;
for(int i=1;i<n;++i){
if(l[i].ang-l[i-1].ang>EPS){//去重,如果该边和前面的边平行,则忽略。
l[tmp++]=l[i];
}
}n=tmp;
st[0]=l[0];st[1]=l[1];
for(int i=2;i<n;++i){
if(Parellel(st[top],st[top-1])||Parellel(st[bot],st[bot+1])) return 0;
while(bot<top&&JudgeOut(l[i],LineInterDot(st[top],st[top-1]))) --top;
while(bot<top&&JudgeOut(l[i],LineInterDot(st[bot],st[bot+1]))) ++bot;
st[++top]=l[i];
}
while(bot<top&&JudgeOut(st[bot],LineInterDot(st[top],st[top-1]))) --top;
while(bot<top&&JudgeOut(st[top],LineInterDot(st[bot],st[bot+1]))) ++bot;
if(top<=bot+1) return 0.00;
st[++top]=st[bot];
ccnt=0;
for(int i=bot;i<top;++i){
convex[ccnt++]=LineInterDot(st[i],st[i+1]);
}double ans=0;
convex[ccnt]=convex[0];
for(int i=0;i<ccnt;++i){
ans+=CroMul(V(Point(0,0),convex[i]),V(Point(0,0),convex[i+1]));
}return ans/2;
}
然后验证一下板子的正确性,进行OJ测试,例题:
这里是关于半平面求交的题目汇总的链接:https://blog.csdn.net/qq_40482358/article/details/87921815
查看作者更多博客:https://blog.nowcoder.net/remil
