
ORB SLAM2源码解读(二):MapPoint类


MapPoint是地图中的特征点,它自身的参数是三维坐标和描述子,在这个类中它需要完成的主要工作有以下方面:
1)维护关键帧之间的共视关系
2)通过计算描述向量之间的距离,在多个关键帧的特征点中找最匹配的特征点
3)在闭环完成修正后,需要根据修正的主帧位姿修正特征点
4)对于非关键帧,也产生MapPoint,只不过是给Tracking功能临时使用
它的主要功能梳理完以后,我们就可以看它对应的函数了,先通过一张图梳理它的主要函数


下面我们逐个分析它的这些函数。另外,一些重要的变量会在遇到的时候顺便解释,不会单独作为一个小节专门去讲解变量含义
1)MapPoint:构造函数
它的构造函数一共有两个,分别对应关键帧和普通帧。
- 关键帧相关的地图点构造函数:MapPoint(const cv::Mat &Pos, KeyFrame* pRefKF, Map* pMap)
其中Pos指的是该点的3D位置,pRefKF是参考关键帧,pMap是地图。
和关键帧相关的地图点构造函数主要是突出地图点和关键帧之间的观测关系,参考关键帧是哪一帧,该地图点被哪些关键帧观测到。一个地图点会被多个关键帧观测到,多个关键帧之间通过共同观测到地图点而发生的关系叫共视关系,在orb slam中,就是通过MapPoint类来维护共视关系的。在进行局部BA优化时,只优化具有共视关系的这些关键帧,其他关键帧的位姿不参与优化。
- 普通帧相关的地图点构造函数:MapPoint(const cv::Mat &Pos, Map* pMap, Frame* pFrame, const int &idxF)
其中Pos指的是该点的3D位置,pMap是地图,pFrame是对应的普通帧,idxF是地图点在该帧特征点中的索引号。
2)AddObservation(KeyFrame* pKF, size_t idx):增加地图点的观测关系
它包含两个参数:KeyFrame* pKF是对应的关键帧,size_t idx是该地图点在关键帧中对应的索引值
它的作用是判断此关键帧是否已经在观测关系中了,如果是,这里就不会添加;如果不是,往下记录下此关键帧以及此MapPoint的索引,就算是记录下观测信息了
void MapPoint::AddObservation(KeyFrame* pKF, size_t idx) {
unique_lock<mutex> lock(mMutexFeatures);
//如果已经存在观测关系,就返回
if(mObservations.count(pKF))
return;
//如果不存在,就添加
mObservations[pKF]=idx;
//分成单目和双目两种清空添加观测,单目时观测次数加1,双目时观测次数加2
if(pKF->mvuRight[idx]>=0)
nObs+=2;
else
nObs++;
}
此处涉及到两个重要变量:
- std::map<KeyFrame *, size_t> mObservations
它是用来存放观测关系的容器,把能够观测到该MapPoint的关键帧,以及MapPoint在该关键帧中对应的索引值关联并存储起来
- int nObs
它用来记录被观测的次数
3)EraseObservation(KeyFrame* pKF):删除观测关系
它的参数KeyFrame* pKF指的是关键帧
这个函数首先判断该关键帧是否在观测中,如果在,就从存放观测关系的容器mObservations中移除该关键帧,接着判断该帧是否是参考关键帧,如果是,参考关键帧换成观测的第一帧,因为不能没有参考关键帧呀。删除以后,如果该MapPoint被观测的次数小于2,那么这个MapPoint就没有存在的必要了,需要删除。
void MapPoint::EraseObservation(KeyFrame* pKF)
{
bool bBad=false;
{
unique_lock<mutex> lock(mMutexFeatures);
//判断该关键帧是否在观测关系中,即该关键帧是否看到了这个MapPoint
if(mObservations.count(pKF))
{
int idx = mObservations[pKF];
//这里同样要判断单目和双目,单目时观测次数减1,双目时减2
if(pKF->mvuRight[idx]>=0)
nObs-=2;
else
nObs--;
//删除该关键帧对应的观测关系
mObservations.erase(pKF);
//如果关键帧是参考帧则重新指定
if(mpRefKF==pKF)
mpRefKF=mObservations.begin()->first;
// 当被观测次数小于等于2时,该地图点需要剔除
if(nObs<=2)
bBad=true;
}
}
//即删除地图点
if(bBad)
SetBadFlag();
}
4)SetBadFlag:删除地图点
它的作用就是删除地图点,并清除关键帧和地图中所有和该地图点对应的关联关系
void MapPoint::SetBadFlag()
{
map<KeyFrame*,size_t> obs;
{
unique_lock<mutex> lock1(mMutexFeatures);
unique_lock<mutex> lock2(mMutexPos);
mbBad=true;
obs = mObservations;
//清除该地图点所有的观测关系
mObservations.clear();
}
for(map<KeyFrame*,size_t>::iterator mit=obs.begin(), mend=obs.end(); mit!=mend; mit++)
{
KeyFrame* pKF = mit->first;
//删除关键帧中和该MapPoint对应的匹配关系
pKF->EraseMapPointMatch(mit->second);
}
//从地图中删除MapPoint
mpMap->EraseMapPoint(this);
}
5)Replace(MapPoint* pMP):替换地图点
MapPoint* pMP就是用来替换的地图点
该函数的作用是将当前地图点(this),替换成pMp,这主要是因为在使用闭环时,完成闭环优化以后,需要调整地图点和关键帧,建立新的关系。
具体流程是循环遍历所有的观测信息,判断此MapPoint是否在该关键帧中,如果在,那么只要移除原来MapPoint的匹配信息,最后增加这个MapPoint找到的数量以及可见的次数,另外地图中要移除原来的那个MapPoint。最后需要计算这个点独有的描述子。
void MapPoint::Replace(MapPoint* pMP)
{
//如果传入的该MapPoint就是当前的MapPoint,直接跳出
if(pMP->mnId==this->mnId)
return;
int nvisible, nfound;
map<KeyFrame*,size_t> obs;
{
unique_lock<mutex> lock1(mMutexFeatures);
unique_lock<mutex> lock2(mMutexPos);
obs=mObservations;
mObservations.clear();
mbBad=true;
nvisible = mnVisible;
nfound = mnFound;
mpReplaced = pMP;
}
for(map<KeyFrame*,size_t>::iterator mit=obs.begin(), mend=obs.end(); mit!=mend; mit++)
{
// Replace measurement in keyframe
KeyFrame* pKF = mit->first;
// 如果该MapPoint不在关键帧的观测关系中,就添加观测关系
if(!pMP->IsInKeyFrame(pKF))
{
pKF->ReplaceMapPointMatch(mit->second, pMP);
pMP->AddObservation(pKF,mit->second);
}
//如果在就删除关键帧和老的MapPoint之间的对应关系
else
{
pKF->EraseMapPointMatch(mit->second);
}
}
pMP->IncreaseFound(nfound);
pMP->IncreaseVisible(nvisible);
pMP->ComputeDistinctiveDescriptors();
//删掉Map中该地图点
mpMap->EraseMapPoint(this);
}
6)ComputeDistinctiveDescriptors:计算最匹配的描述子
由于一个MapPoint会被许多相机观测到,因此在插入关键帧后,需要判断是否更新当前点的最适合的描述子。最好的描述子与其他描述子应该具有最小的平均距离,因此先获得当前点的所有描述子,然后计算描述子之间的两两距离,对所有距离取平均,最后找离这个中值距离最近的描述子。
void MapPoint::ComputeDistinctiveDescriptors()
{
// Retrieve all observed descriptors
vector<cv::Mat> vDescriptors;
map<KeyFrame*,size_t> observations;
{
unique_lock<mutex> lock1(mMutexFeatures);
//如果地图点标记为不好,直接返回
if(mbBad)
return;
observations=mObservations;
}
//如果观测为空,则返回
if(observations.empty())
return;
//保留的描述子数最多和观测数一致
vDescriptors.reserve(observations.size());
for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++)
{
KeyFrame* pKF = mit->first;
if(!pKF->isBad())
//针对每帧的对应的都提取其描述子
vDescriptors.push_back(pKF->mDescriptors.row(mit->second));
}
if(vDescriptors.empty())
return;
// Compute distances between them
const size_t N = vDescriptors.size();
float Distances[N][N];
for(size_t i=0;i<N;i++)
{
Distances[i][i]=0;
for(size_t j=i+1;j<N;j++)
{
int distij = ORBmatcher::DescriptorDistance(vDescriptors[i],vDescriptors[j]);
Distances[i][j]=distij;
Distances[j][i]=distij;
}
}
// Take the descriptor with least median distance to the rest
// 选择距离其他描述子中值距离最小的描述子作为地图点的描述子,基本上类似于取了个均值
int BestMedian = INT_MAX;
int BestIdx = 0;
for(size_t i=0;i<N;i++)
{
vector<int> vDists(Distances[i],Distances[i]+N);
sort(vDists.begin(),vDists.end());
int median = vDists[0.5*(N-1)];
if(median<BestMedian)
{
BestMedian = median;
BestIdx = i;
}
}
{
unique_lock<mutex> lock(mMutexFeatures);
mDescriptor = vDescriptors[BestIdx].clone();
}
}
7)UpdateNormalAndDepth:更新法向量和深度值
由于图像提取描述子是使用金字塔分层提取,所以计算法向量和深度可以知道该MapPoint在对应的关键帧的金字塔哪一层可以提取到。
明确了目的,下一步就是方法问题,所谓的法向量,就是也就是说相机光心指向地图点的方向,计算这个方向方法很简单,只需要用地图点的三维坐标减去相机光心的三维坐标就可以。
void MapPoint::UpdateNormalAndDepth()
{
map<KeyFrame*,size_t> observations;
KeyFrame* pRefKF;
cv::Mat Pos;
{
unique_lock<mutex> lock1(mMutexFeatures);
unique_lock<mutex> lock2(mMutexPos);
if(mbBad)
return;
observations=mObservations;
pRefKF=mpRefKF;
Pos = mWorldPos.clone();
}
if(observations.empty())
return;
cv::Mat normal = cv::Mat::zeros(3,1,CV_32F);
int n=0;
for(map<KeyFrame*,size_t>::iterator mit=observations.begin(), mend=observations.end(); mit!=mend; mit++)
{
KeyFrame* pKF = mit->first;
cv::Mat Owi = pKF->GetCameraCenter();
//观测点坐标减去关键帧中相机光心的坐标就是观测方向
//也就是说相机光心指向地图点
cv::Mat normali = mWorldPos - Owi;
//对其进行归一化后相加
normal = normal + normali/cv::norm(normali);
n++;
}
cv::Mat PC = Pos - pRefKF->GetCameraCenter();
const float dist = cv::norm(PC);
const int level = pRefKF->mvKeysUn[observations[pRefKF]].octave;
const float levelScaleFactor = pRefKF->mvScaleFactors[level];
const int nLevels = pRefKF->mnScaleLevels;
//深度范围:地图点到参考帧(只有一帧)相机中心距离,乘上参考帧中描述子获取金字塔放大尺度
//得到最大距离mfMaxDistance;最大距离除以整个金字塔最高层的放大尺度得到最小距离mfMinDistance.
//通常说来,距离较近的地图点,将在金字塔较高的地方提出,
//距离较远的地图点,在金字塔层数较低的地方提取出(金字塔层数越低,分辨率越高,才能识别出远点)
//因此,通过地图点的信息(主要对应描述子),我们可以获得该地图点对应的金字塔层级
//从而预测该地图点在什么范围内能够被观测到
{
unique_lock<mutex> lock3(mMutexPos);
mfMaxDistance = dist*levelScaleFactor;
mfMinDistance = mfMaxDistance/pRefKF->mvScaleFactors[nLevels-1];
mNormalVector = normal/n;
}
}
8)PredictScale(const float ¤tDist, KeyFrame* pKF):预测尺度
其中currentDist是当前距离,pKF是关键帧
该函数的作用是预测特征点在金字塔哪一层可以找到。示意图如下:
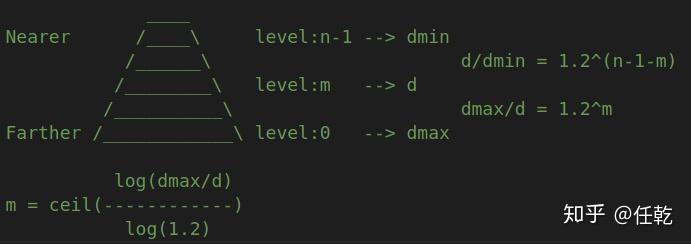

注意金字塔ScaleFactor和距离的关系:当特征点对应ScaleFactor为1.2的意思是:图片分辨率下降1.2倍后,可以提取出该特征点(分辨率更高的时候,肯定也可以提出,这里取金字塔中能够提取出该特征点最高层级作为该特征点的层级),同时,由当前特征点的距离,推测所在的层级。
int MapPoint::PredictScale(const float ¤tDist, KeyFrame* pKF)
{
float ratio;
{
unique_lock<mutex> lock(mMutexPos);
ratio = mfMaxDistance/currentDist;
}
int nScale = ceil(log(ratio)/pKF->mfLogScaleFactor);
if(nScale<0)
nScale = 0;
else if(nScale>=pKF->mnScaleLevels)
nScale = pKF->mnScaleLevels-1;
return nScale;
}
