自动驾驶,系统架构领航功能演进,P7案例分析

自动驾驶使命者


自动驾驶产品开发过程中,系统驾驶设计至关重要,架构决定功能。如果要自研功能,肯定要花心思自己设计架构。自动驾驶的三部曲,系统架构=》大数据=》功能演进。我在特斯拉研发Autopilot2.0期间,越到后面越意识到其实很多瓶颈是架构的设计问题,比如2017年夏天我们发现摄像头其实选的有局限性,晚上对方来车看着有ghost,Elon很生气。比如一直被美国用户诟病的Phantum Break, 高速公路上有时突然急刹车,其实是雷达分辨率不够,出了很多起事故。但是架构一旦上了车,就很难去更改,加上有些布置位置还要受整车设计和造型的局限,难上加难。这篇文章结合我加入小鹏后针对P7设计的自动驾驶架构来解析一下架构设计的关键思路和理念,顺便提一下,为了做好这个架构,我还专门成立了架构委员会,针对不同关键模块和选型进行了深入的讨论。
其实在今年早些时候我就已经在美国分享过,2019年Nvidia GTC,是每年一次的NVIDIA盛会,宣布英伟达芯片新产品并邀请国际最有影响力的合作方来一起交流,分享最新成果。作为英伟达。我和我们的传感器架构师Atif之前都在特斯拉就职,跟NVIDIA合作很深,我们第一个国际上将其车载计算平台Xavier用于量产车辆的合作。我们受邀演讲,解读了小鹏汽车第二款电动轿车P7的系统设计和功能roadmap,具体参见官方公布的NVIDIA 2019 GTC 演讲视频, 我的LinkedIN上有P共享PPT。
- 论架构的好坏评判标准:一个坏的架构传感能力和计算能力不能平衡,最后导致功能出不来(比如Audi A8的L3自动驾驶据内幕人说就是传感有缺陷,然后计算能力也不足),一个好的架构要做到三点,一要系统各项指标平衡,功能才能出来,这是科学也是经验,二要解决场景的痛点(比如中国场景的加塞覆盖,特斯拉就做不太好),三是要在一个快速发展的技术潮流下保持至少3年的先进性,才能满足整车厂的产品迭代周期要求。当然了,最后还有价格。价格可控、可接受、符合产品定位,是乘用车区别于无人驾驶出租车的一个很大的关键,要卖给消费者的就不能用最贵的、稀缺的部件,比如60万一个的激光雷达,比车还贵,买卖就没法做咯。或者用服务器做计算单元,藏在后备箱里,那也不是产品。
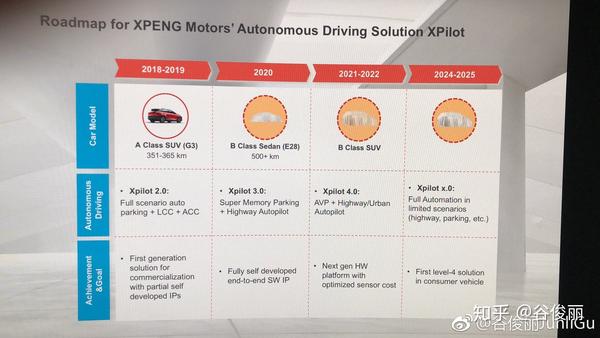
- 自动驾驶功能设计两点: 小鹏P7目标实现高速巡航和记忆泊车等L3级功能,同时HMI将会设计特殊的虚拟环境显示将汽车看到的虚拟环境增强显示给乘客,增进人对自动驾驶车辆的理解和分工合作,增强自动驾驶功能的可用度和安全性。
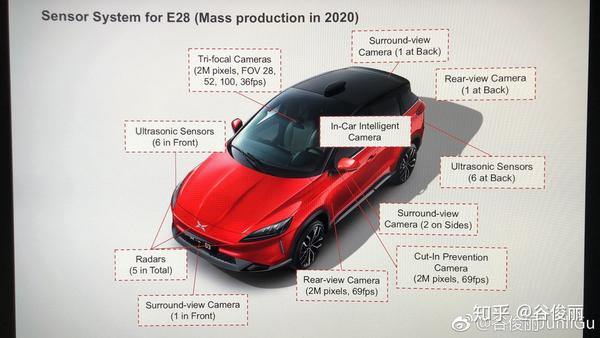
- 业界领先的自动驾驶系统架构设计:为了实现系列功能且保证量产化,P7采用了摄像头为主传感器,8个自动驾驶摄像头,针对中国场景细节采取了不同的精度和布置位置,5个最新的第五代雷达技术(相对第四代雷达提高了两倍角分辨率),尤其要提到的是第五代雷达可以镶嵌到汽车车皮里面,不像第四代要挖个洞,暴露在外面,这个对于车身美观设计很重要的,尤其是P7的流体立身,我们的整车部门很感谢我们用了第五代技术;跟合作伙伴定制的定位模块实现20厘米的定位精度(即便没有视觉定位情况下),提一下我相信在中国会是先用RTK的,这个给计算减轻了压力,但是IMU和GPS一定要选好(比如GPS信号要考虑在城市大楼遮蔽情况下如何恢复);除此之外,泊车系统还采用了12个超声波雷达和4和环视摄像头;强大的传感器需要强大的计算能力支撑,我们采用了英伟达最新的车载高性能SOC Xavier,提供高达30TOPS的计算,这是业界现在商用的最强的车载计算平台。
- 针对中国场景设计:我在特斯拉工作期间,深知特斯拉系统架构的在中国场景下的局限性,因此小鹏P7架构在设计的过程中充分考虑了中国场景的特殊性。其实架构设计并不是天马行空的堆叠部件,是一个需要系统验证的研究+实操性工作,我们借助G3做了大量深入的中国场景的探讨和推论验证,其中一个问题就是中国加塞。加塞问题在城市和低速行驶下是一个痛点,解决不好这个问题就解决不了中国的自动驾驶问题。P7架构摄像头首先要实现场景的360度无死角覆盖,但这是只是一个基础的感知要求,每个摄像头细究起来在其探测精度、距离、角度和整车安装位置上都要经过一番缜密的论证分析,然后针对具体的功能做实现的可行性论证。举例细说起来,在前向三个摄像头中联合起来在距离和角度层面分别涵盖200米距离到120度广角,布置在后视镜后面,这是经典位置;前向侧角两个摄像头专门针对中国式加塞和十字路口对向来车设计,布置在左右后视镜部件里面,这应该是个创新,最近P7已经面世了 大家可以仔细看看;特斯拉的侧前向摄像头布置在B柱里面,很隐蔽,但是视野很受限,有检测盲区;前向和侧前向感知主要保证我不撞人;后向侧角实现盲区监测,侧后向布置比较棘手,我们专门做了一个小造型,仔细看看上面的P7图片,你可以在P7前轮胎附近车身上的黑色部件里面找到摄像头,这个也是借用了特斯拉的布置位置;后向摄像头针对后方来车可以检测到将近100米距离,后向和侧后向摄像头主要保证人不撞我,后面来个大卡车冲向你,也可以加速避障;摄像头能够检测物体,但是不能精准测速和测距,所以采用摄像头为主的传感器系统同时也要搭配雷达系统,成为感知能力的左膀右臂。雷达系统的话我们采用了5个雷达,前向测距200米以上,然后每个车角各一个侧向雷达,前向摄像头和前向雷达做感知融合,侧向摄像头和对用位置的侧向雷达做感知,注意因为布置位置不能做到完全一样,所以摄像头和雷达在融合的时候视野要校准。另外车里,还有一个摄像头专门探测驾驶员状态,保证智能化功能的全方位感知要求。其次,泊车子系统采用了超声波和摄像头结合的增强感知,保证能够听到且看到停车厂和停车位的不同障碍物和可能的复杂情况。目前在量产方案上,特斯拉主要还是采用超声波的单一传感,当然了在目前推进的summon功能上已经开始融合视觉摄像头的功能了。具体传感器位置请参见后面的附图,今天先大概写写,等后续有时间了需要画出来对比,这是一个数学和几何问题。
- 安全和冗余机制设计:一个好的自动驾驶系统一定要考虑安全的设计,安全的设计不在于用多少个传感器,而是一个系统化的分层的概念。在安全层面,采用了副计算单元和完全独立的博世AEB系统,来保证高级功能不牺牲安全系数。这个设计意味着,高级智能驾驶功能如果失败了,最差情况下我们还有紧急刹车功能,保证用户的生命安全。我想强调一句,AEB是很关键的,著名的Uber的黑夜撞自行车事故就是因为AEB被拿掉了。特斯拉刚把Mobileye去掉那会,用的自己写的AEB, 我跟你讲,这是世界上最激进最危险的研发任务,堪称疯狂至极。一堆参数要调,搞不好要死人的,反正我是不敢做这个功能模块开发。
- OTA软件空中升级:OTA是判断一辆车是否是智能互联的基本功能,没有OTA就好像人的血脉不通,何来进化能力。这是一辆车由机械化设备升级为IT设备的一个质变,说着貌似很简单,而目前在国际上貌似还只有Tesla少数几家打通了这个功能。在P7上,我们考虑所有的ECU和计算单元都具备OTA升级功能,包括我们如上提到的。
- 跟特斯拉横向对比:分传感和计算分别来客观对比,P7的传感性能整体比特斯拉强一倍之上,计算能力比最新特斯拉要低一倍。拿数据说话,P7的摄像头为200万像素,特斯拉仍在采用130万像素;P7的摄像头具备更强的低光性能,即在低光照情况下性能更佳;P7的雷达感知性能比特斯拉的雷达技术要先进一代,具体在感知能力上大约为三倍;计算能力上P7介于特斯拉第二代硬件和第三代硬件之间,P7是30TOPS,特斯拉第二代硬件的NVIDIA的Pascal芯片,提供10TOPS左右的计算能力,特斯拉的第三代硬件FSD芯片是70TOPS,但是这个只供特斯拉自己使用。
这个架构,在2020年应该是业界领先,之后持续保持两三年内领先没有问题,给后续的演进提供了足够的支撑和空间。我很期待后面的功能,也很愿意跟大家交流讨论哈
!





编辑于 2019-11-20 00:11
